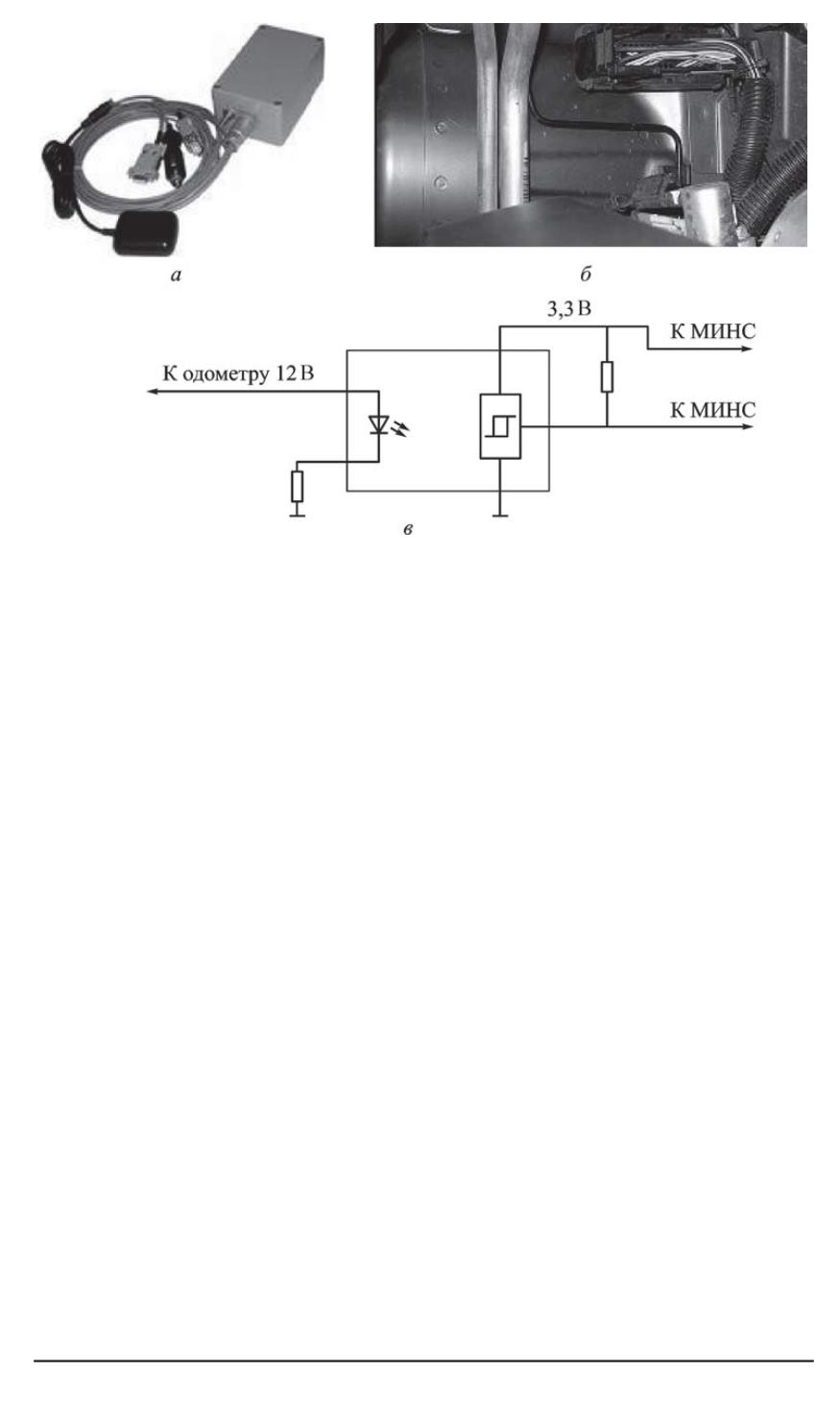
Рис. 2. Использованное в эксперименте оборудование:
а
— МИНС Компанав-2Т с подключенным приемником GPS-сигнала SIRF;
б
— место
съема сигнала одометра;
в
— опторазвязка сигнала одометра
настоящей работе проводится подключение к линии, по которой про-
ходит сигнал от одометра к приборной панели автомобиля (рис. 2,
б
).
Сигнал по этой линии поступает на вход микросхемы опторазвязки
H11L, выход которой подключен к разъему МИНС. Схема подключе-
ния приведена на рис. 2,
в
. С помощью осциллографа были проанали-
зированы параметры сигнала, а затем проведена калибровка одометра.
Проезд ТС был осуществлен по двум траекториям — основной и
контрольной, проходящим в пределах города Москвы по Варшавско-
му шоссе и прилегающим к нему улицам в условиях многоэтажной
застройки, что частично затеняет сигналы спутников СНС. Число ви-
димых спутников (в течение более, чем 95% времени эксперимента)
было достаточным для получения информации о текущем положении
ТС.
На первом этапе эксперимента были вычислены две оценки основ-
ной траектории. За эталонную оценку траектории были приняты дан-
ные, полученные от МИНС. Исследуемая оценка траектории получе-
на комплексированием данных одометра, вычисляющего пройденный
путь, и данных СНС о курсе. Пересчет данных в стандартную форму
(как в МИНС) проводился по уравнению (10а). Поскольку одометр
способен измерять только относительное перемещение ТС, то началь-
ные точки обеих траекторий были совмещены. Расстояние между точ-
кой по эталонной оценке траектории и соответствующей точкой по
46 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 4


