Таблица 4
Точность комплексированного решения и исходных приборов
Параметр
Комплексированное
решение
Одометр
Акселерометр
Ускорение, м/с
2
5,029
·
10
−
3
32
6,22
·
10
−
3
Скорость, м/c
1,734
·
10
−
2
1,6
Ошибка нарастает
Путь, м
4,071
·
10
−
2
16
·
10
−
2
Ошибка нарастает
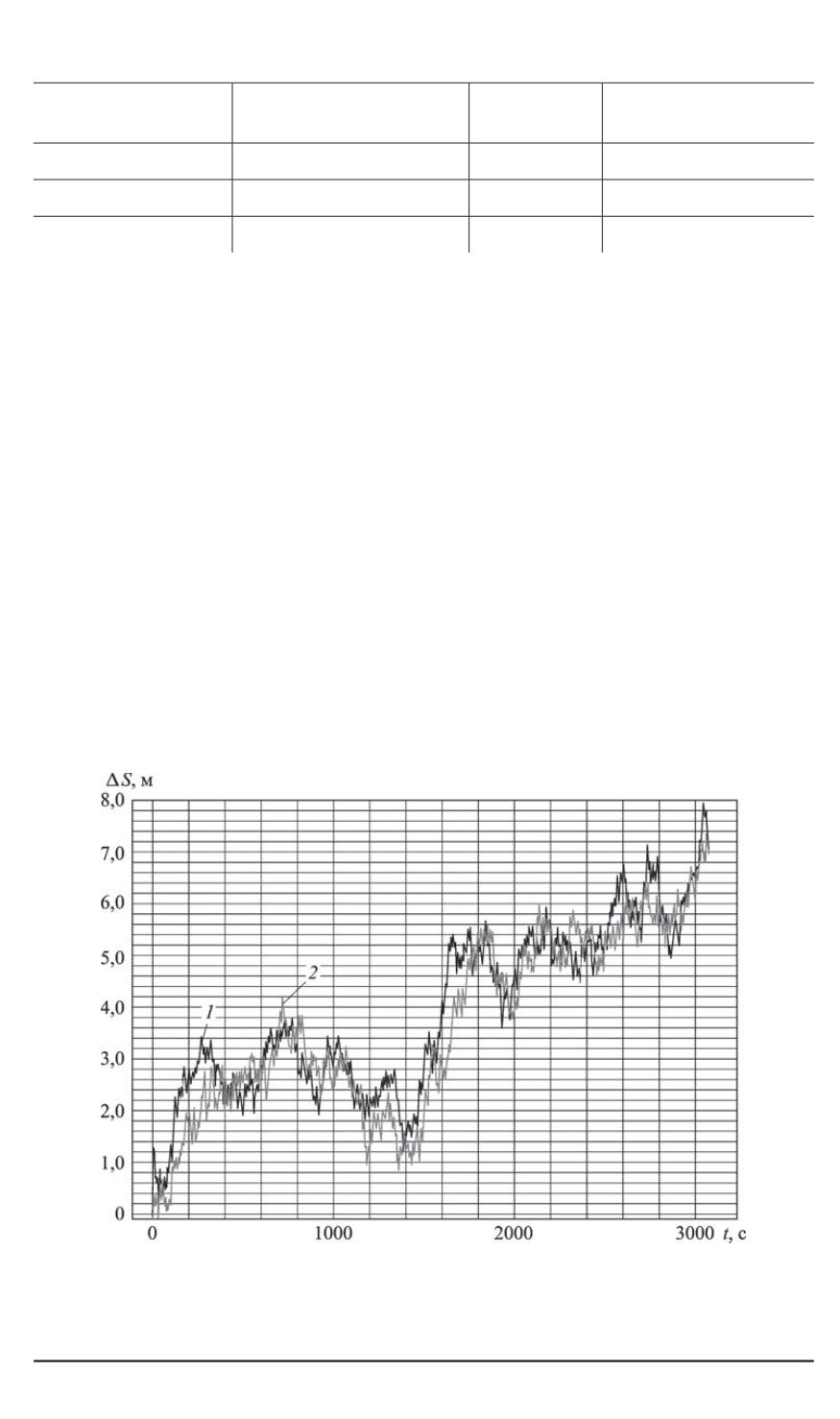
Результат моделирования представлен на рис. 6, где построены гра-
фики моделируемой ошибки системы (1) и ее оценки (2). Применение
предложенного алгоритма оценивания дает положительный результат,
так как среднеквадратическое отклонение ошибки оценивания в таком
режиме составляет 0,88 м.
Такая точность позволяет применять интегрированную систему,
например для выполнения сельскохозяйственных работ, где требует-
ся точное управление транспортным средством при его движении по
полю.
Выводы.
1. Выведены соотношения для включения данных одо-
метра в стандартную модель погрешности ИНС–СНС.
2. Сравнение полученных в работе экспериментальных данных и
величин, которые были предсказаны исходя из теоретических соотно-
шений, показало, что в целом теоретические значения погрешности
определения относительного положения ТС в системе одометр–СНС
Рис. 6. Зависимость изменения погрешностей по северной координате от вре-
мени:
1
— истинное значение,
2
— оценка фильтром Калмана
52 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 4


