˙
v
=
g
(
u
T
−
sin Θ);
˙Θ =
g/v
(
u
cos
γ
C
−
cos Θ);
˙Ψ =
−
gu
sin
γ
C
/v
cos Θ;
˙
x
=
v
cos Θ cos Ψ;
˙
y
=
v
sin Θ;
˙
z
=
−
v
cos Θ sin Ψ
,
(9)
где
v
— скорость летательного аппарата;
Θ
— угол наклона траектории;
Ψ
— угол поворота траектории;
y
— высота летательного аппарата;
u
T
— тангенциальная перегрузка;
u
— нормальная перегрузка;
γ
C
—
скоростной угол крена;
g
— ускорение свободного падения [1].
Управлениями летательного аппарата являются тангенциальная пе-
регрузка, нормальная перегрузка искоростной угол крена, так что
U
= (
u
T
, u, γ
C
)
т
. На управления наложены ограничения
u
min
T
u
T
u
max
T
;
u
min
T
=
−
1
,
6;
u
max
T
= 0
,
6;
|
u
|
u
max
;
u
max
= 8;
|
γ
C
|
π.
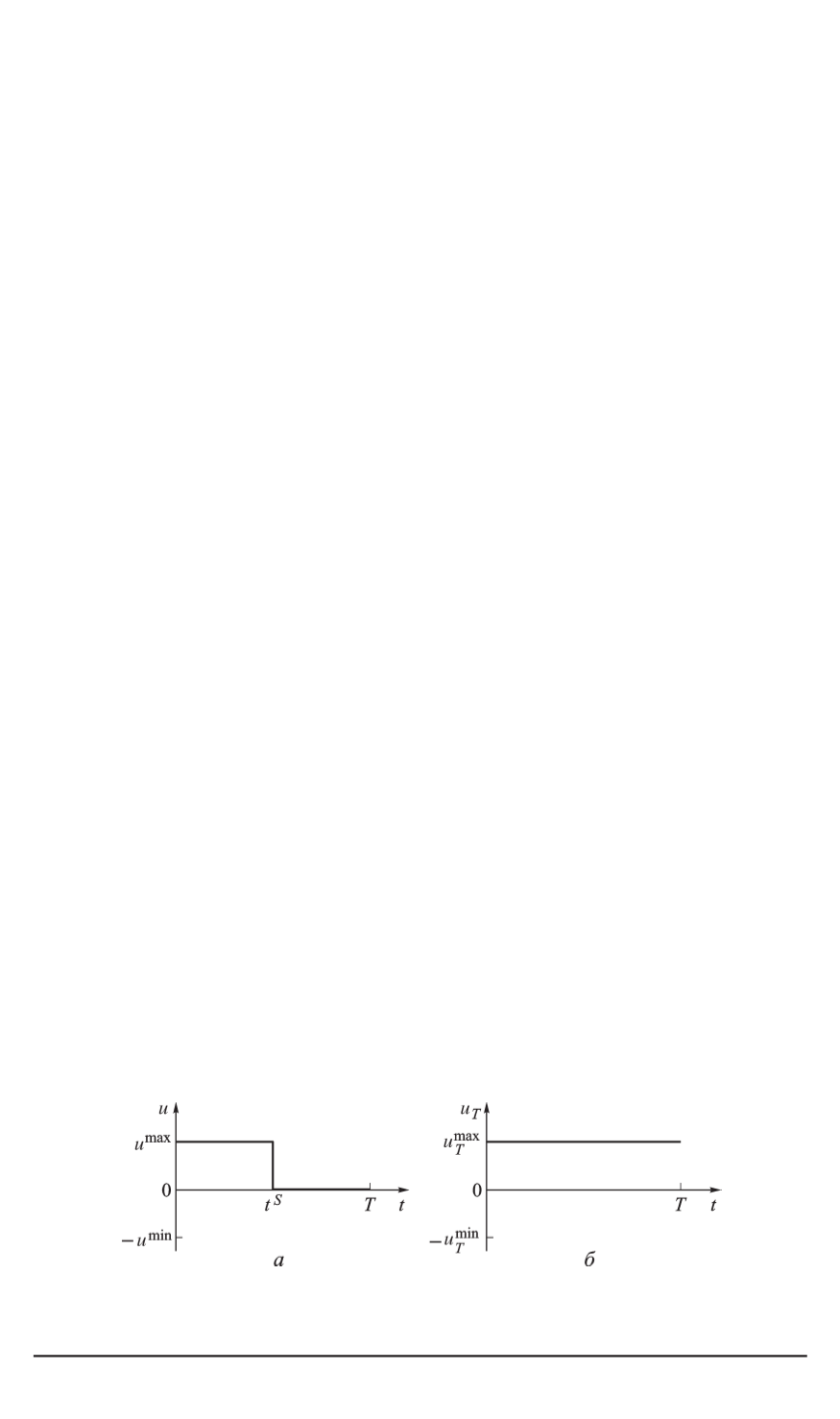
Дальняя, ближняя и боковая границы области достижимости систе-
мы (9) формируются управлениями, принадлежащими классу кусочно-
постоянных управлений с одной точкой переключения [1]. Ограни-
чимся рассмотрением дальней границы области достижимости. Для
каждого допустимого угла крена
γ
C
(
t
) =
const структура управлений,
формирующих эту границу, приведена на рис. 3.
Метод мультифиниша.
Для экспериментального исследования
эффективности метода мультифиниша разработана MPI-программа
[4], реализующая этот метод. Эксперименты выполнены на виртуаль-
ном кластере, созданном с помощью программной системы VMware
[12] и функционирующим под управлением свободно распространя-
емой операционной системы Ubuntu [13]. Результаты экспериментов
приведены на рис. 4, из которого следует, что при числе процессоров
от 2 до 10 достигается ускорение, близкое к расчетному.
Рис. 3. Структура управлений, формирующих дальнюю границу области дости-
жимости
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 2 15


