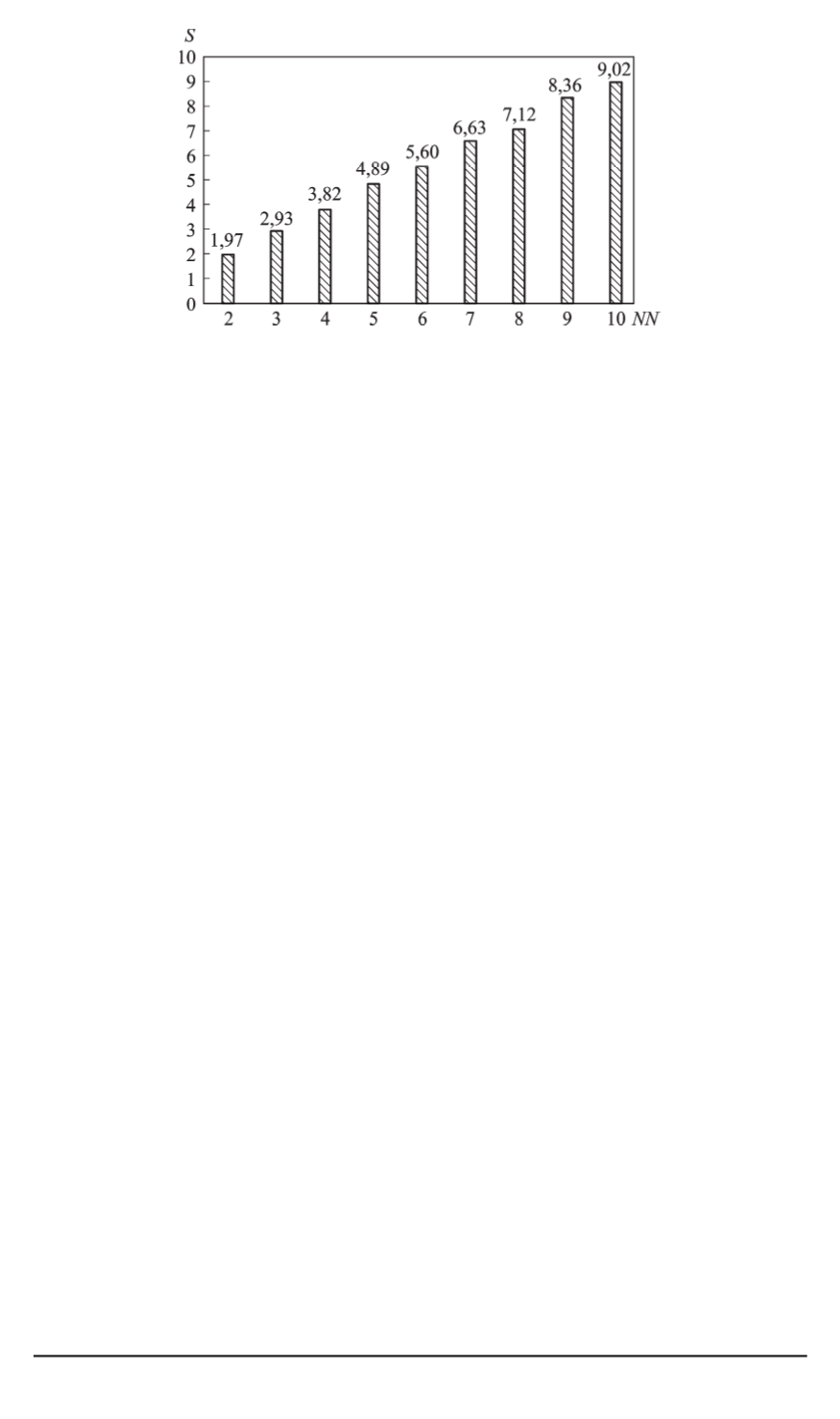
Рис. 4. Ускорение метода мультифиниша
Приведенные на рис. 4 экспериментальные результаты получе-
ны при следующих значениях параметров задачи:
v
(0) = 330
м/с;
Θ(0) = 0
;
Ψ(0) = 0
;
x
(0) = 0
;
y
(0) = 10000
м;
z
(0) = 0
;
T
= 15
с.
Аппроксимация векторного поля системы ОДУ.
Рассмотрим пло-
скую задачу (9), когда
Ψ(
t
)
≡
0
,
t
∈
[0
, T
]
,
T
= 30
с. Предположим,
что область фазового пространства
D
X
системы (9) определяется не-
равенствами
1
,
6
v
зв
v
(
t
) 1
,
9
v
зв
;
−
90
◦
Θ(
t
) 90
◦
; Ψ(
t
)
≡
0;
0
x
(
t
) 5500
м
; 0
y
(
t
) 2700
м
;
z
(
t
) = 0
.
Здесь
v
зв
= 331
,
46
м/с — скорость звука в воздухе. Принимаются следу-
ющие начальные условия летательного аппарата:
v
(0) = 132
,
584
м/с;
Θ(0) = 0
;
Ψ(0) = 0
;
x
(0) = 0
;
y
(0) = 1000
м;
z
(0) = 0
;
γ
c
(0) = 0
.
В соответствии с методикой покроем интервал времени
[0
, T
]
рав-
номерной сеткой с 20 узлами. Указанную область
D
X
фазового про-
странства системы (9) покроем равномерной сеткой так, что число
шагов этой сетки равно 18, 20, 20, 18 по измерениям
v
,
Θ
,
x
,
y
соот-
ветственно. Наконец, в качестве моментов времени
t
S
переключения
управления
u
рассмотрим
M
= 30
узлов равномерной сетки, покры-
вающей интервал времени
[0
, T
]
(рис. 3,
а
).
Численные эксперименты выполнены для кусочно-постоянной
аппроксимации компонент функции
F
(
t, X, U
)
на указанной сетке
(рис. 5).
Эксперименты показали, что метод обеспечивает погрешность в
определении расстояния от начала координат до дальней границы
области достижимости, не превышающую 4%. В качестве точного
положения этой границы принималось положение, полученное путем
численного интегрирования системы (9) при соответствующем упра-
влении.
Нейросетевая аппроксимация.
В данном случае начальный угол
поворота траектории
Ψ(0)
иначальные координаты
x
(0)
,
y
(0)
,
z
(0)
ле-
16 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 2


