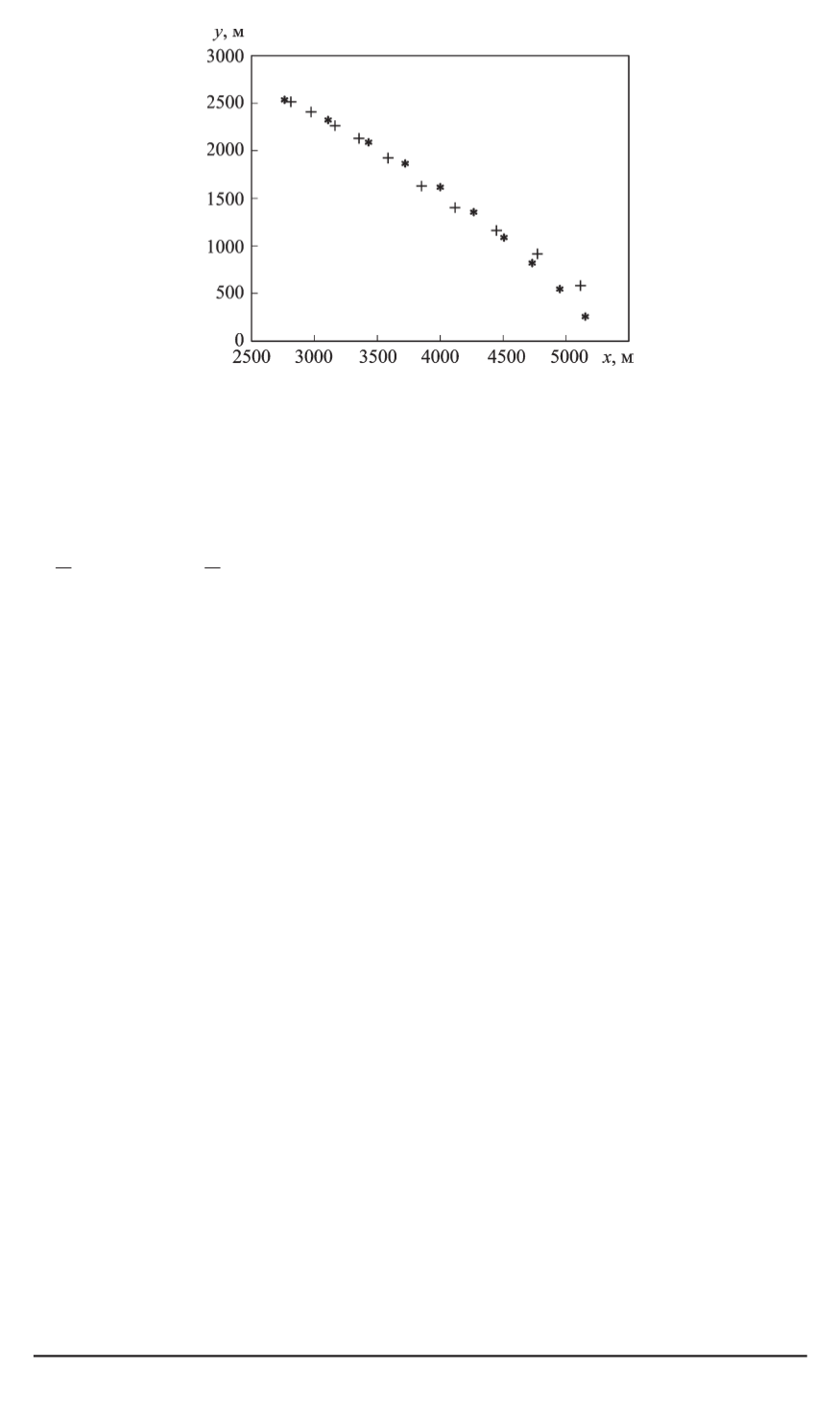
Рис. 5. Дальняя граница области достижимости (“плоская” задача):
* — точная граница; + — приближенная граница
тательного аппарата приняты равными нулю. Так что исходное поло-
жение летательного аппарата определяется начальной скоростью
v
(0)
иначальным углом наклона траектори
Θ(0)
:
1
,
6
v
зв
v
(0) 1
,
9
v
зв
;
−
π
8
Θ(0)
π
8
. Варьируемымипараметрамиявляются точкипере-
ключения
t
S
нормальной перегрузки
u
изначения скоростного угла
крена
γ
C
. Полагается, что
t
S
∈
[0
, T
]
, где
T
∈
[5
,
15]
с. Поскольку
область достижимости симметрична относительности плоскости
Oxy
,
принято, что
γ
C
∈
[0
, π
]
.
Для указанной задачибылипостроены нейронные сетиНС
1
, НС
2
.
Во всех случаях обучающая выборка состояла из 4500 элементов, из
которых 20% случайно выбранных точек использовались в качестве
проверочных для определения момента окончания обучения. Началь-
ные веса и пороговые значения нейронов устанавливались в соответ-
ствии с алгоритмом инициализации Нгуен-Видроу (Nguyen-Widrow)
[11]. Обучение каждой сети выполнялось в среднем 10 раз с раз-
личныминачальнымивесамиипороговымизначениями, на основе
чего выбиралась сеть с минимальным значением ошибки. Для иссле-
дования точностиобученной сетииспользовалась тестовая выборка,
содержащая более 20000 элементов. Все эксперименты выполнены в
программной среде MatLab 6 [11].
Сеть НС
1
. Входной слой сетиНС
1
состоит из пяти элементов, со-
ответствующих величинам
v
(0)
,
Θ(0)
,
T
,
γ
C
,
t
S
. Сеть содержит два
скрытых слоя, содержащих одинаковое число нейронов с функцией
активации в виде гиперболического тангенса. Выходной слой сети
состоит из трех нейронов с линейной функцией активации, соответ-
ствующих координатам
x
(
T
)
,
y
(
T
)
,
z
(
T
)
конечного положения лета-
тельного аппарата.
Исследование показало, что при числе нейронов в сети, равном 22,
максимальная относительная ошибка определения нейронной сетью
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2010. № 2 17


