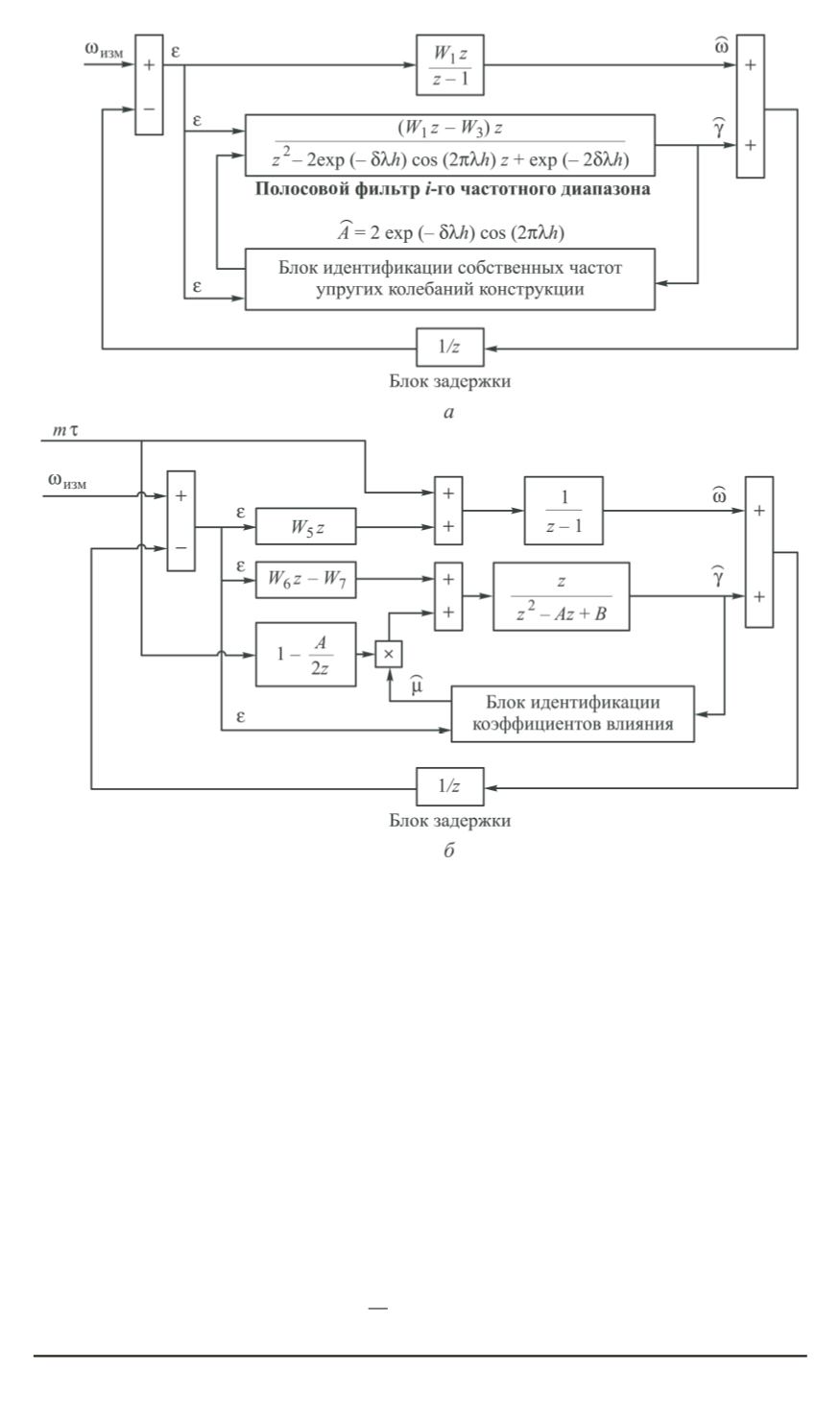
Рис. 1. Блок-схемы адаптивного наблюдателя с оценкой собственных частот ко-
лебаний (
а
) и оценкой коэффициентов влияния (
б
):
ω
изм
— измеренная угловая скорость;
_
ω
— оценка угловой скорости объекта как
твердого тела;
_
γ
— оценка скорости доминирующего тона упругих колебаний кон-
струкции;
ε
— невязка;
m
— управляющее ускорение;
τ
— время работы двигателя;
_
A
,
A
— оценка функции частоты упругих колебаний и ее номинальное значение
соответственно;
_
μ
(
n
)
— оценка коэффициента влияния;
W
1
−
W
8
— весовые коэф-
фициенты
2) во время импульсного включения органов или их выключения
_
_
ω
(
n
+ 1) =
_
ω
(
n
) +
m
(
n
)
τ
(
n
);
_
_
γ
(
n
+ 1) =
A
_
γ
(
n
)
−
B
_
γ
(
n
−
1)+
+
_
μ
(
n
)
m
(
n
)
τ
(
n
)
−
A
2
m
(
n
−
1)
τ
(
n
−
1)
−
W
7
ε
(
n
);
(8)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 3 43


