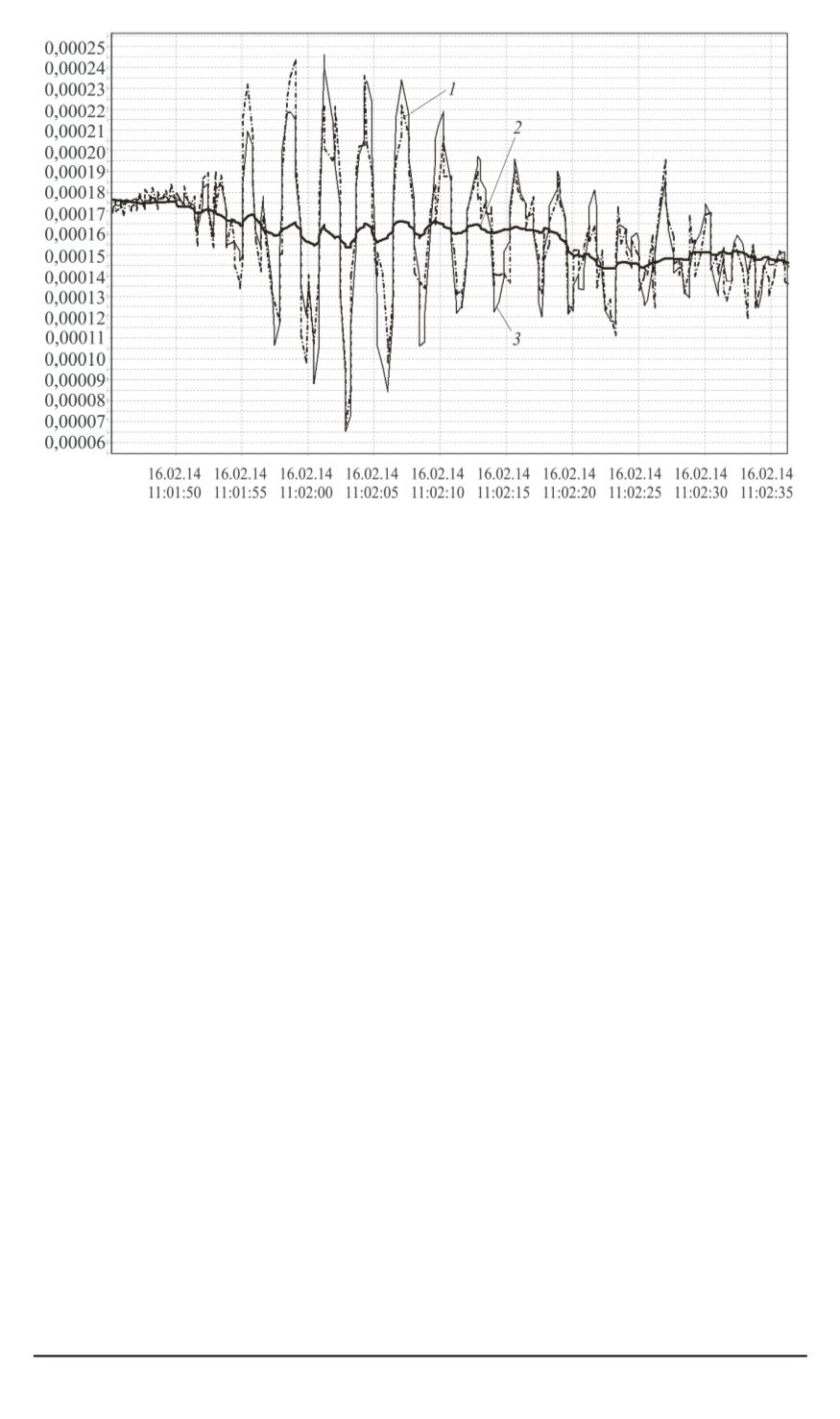
Рис. 4. Динамика измеренной угловой скорости и ее оценок, полученных при
обработке телеметрии с МКС:
1
— угловая скорость с ДУС;
2
— оценка угловой скорости объекта как твердо-
го тела;
3
— сумма оценок угловой скорости по твердому телу и оценки упругой
составляющей угловой скорости
Динамика измеренной угловой скорости и ее оценок при эксплуа-
тации адаптивного наблюдателя на МКС представлены на рис. 4.
Согласно полученным результатам, можно сделать вывод о прием-
лемости оценок вектора состояния, полученных адаптивным наблю-
дателем, для использования их алгоритмом активного демпфирования
упругих колебаний конструкции в качестве исходной информации.
Описание алгоритма активного демпфирования упругих ко-
лебаний конструкции.
Как уже было отмечено, в настоящей работе
предложено использовать один и тот же исполнительный орган как для
управления ориентацией твердым телом, так и для активного демпфи-
рования упругих колебаний конструкции. В связи с этим был разрабо-
тан алгоритм, совмещающий два релейных закона управления, первый
из которых — закон управления твердым телом, а второй — релейный
закон активного демпфирования.
Закон управления твердым телом имеет вид
M
(
u
(
n
)) =
M
0
, u
(
n
)
>
3
u
т
.
т
;
k
0
u
(
n
)
, u
т
.
т
≤
u
(
n
)
≤
3
u
т
.
т
;
0
,
−
u
т
.
т
≤
u
(
n
)
≤
u
т
.
т
;
−
k
0
u
(
n
)
,
−
3
u
т
.
т
≤
u
(
n
)
≤ −
u
т
.
т
;
−
M
0
, u
(
n
)
<
−
3
u
т
.
т
.
(9)
где
M
(
u
(
n
))
— зависимость значения управляющего момента от сиг-
48 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 3


