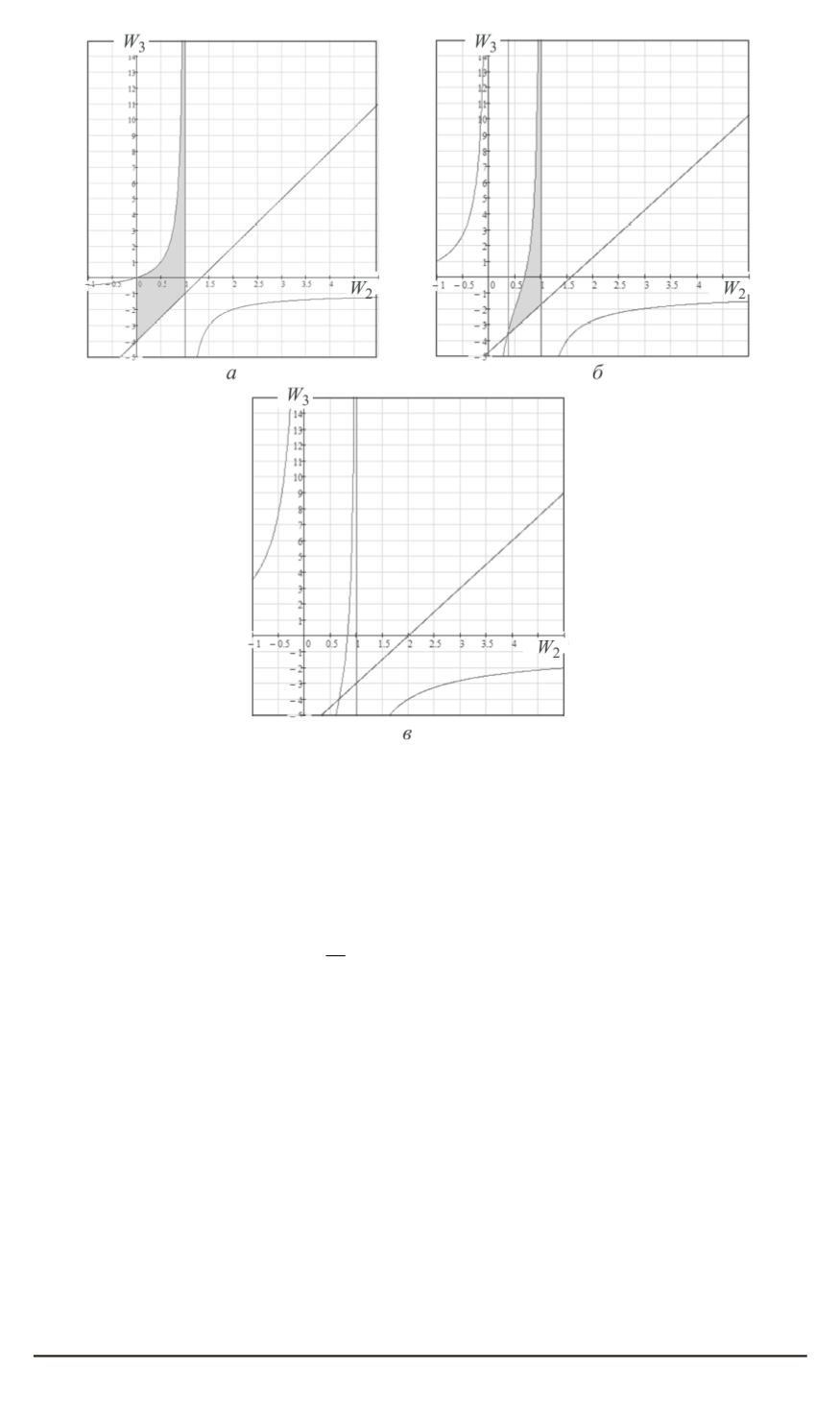
Рис. 2. Область сходимости фильтра при
W
4
sign(
_
γ
(
n
))
_
γ
(
n
) = 0
(
а
),
W
4
sign(
_
γ
(
n
))
_
γ
(
n
) = 1
,
5
(
б
) и
W
4
sign(
_
γ
(
n
))
_
γ
(
n
) = 4
(
в
):
W
4
sign(
_
γ
(
n
))
_
γ
(
n
)
— секущая плоскость, параллельная плоскости
W
2
−
W
3
,
области сходимости закрашены
той в пространстве весовых коэффициентов вместо
W
4
sign(
_
γ
(
n
))
_
γ
(
n
)
будет
W
8
sign(
m
(
n
)
τ
(
n
)
−
A
2
m
(
n
−
1)
τ
(
n
−
1))
.
Результаты численного моделирования процесса настройки борто-
вой модели динамики конструкции в одном из каналов управления
представлены на рис. 3. Значения весовых коэффициентов
W
1
−
W
8
выбирались в соответствии с областями сходимости, показанными на
рис. 2. Динамика конструкции в бортовой модели была представлена
одним доминирующим тоном упругих колебаний с собственной ча-
стотой 0,2 Гц и коэффициентом влияния 2 кг
−
1
∙
м
−
2
. Начальное значе-
ние оценки частоты отличалось от искомого на 50%, а коэффициента
влияния — на 40%. Подстройка частоты и коэффициента влияния осу-
ществлялась при выполнении углового маневра, в процессе которого
проводился набор угловой скорости и ее гашение с помощью релей-
ных исполнительных органов.
46 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 3


