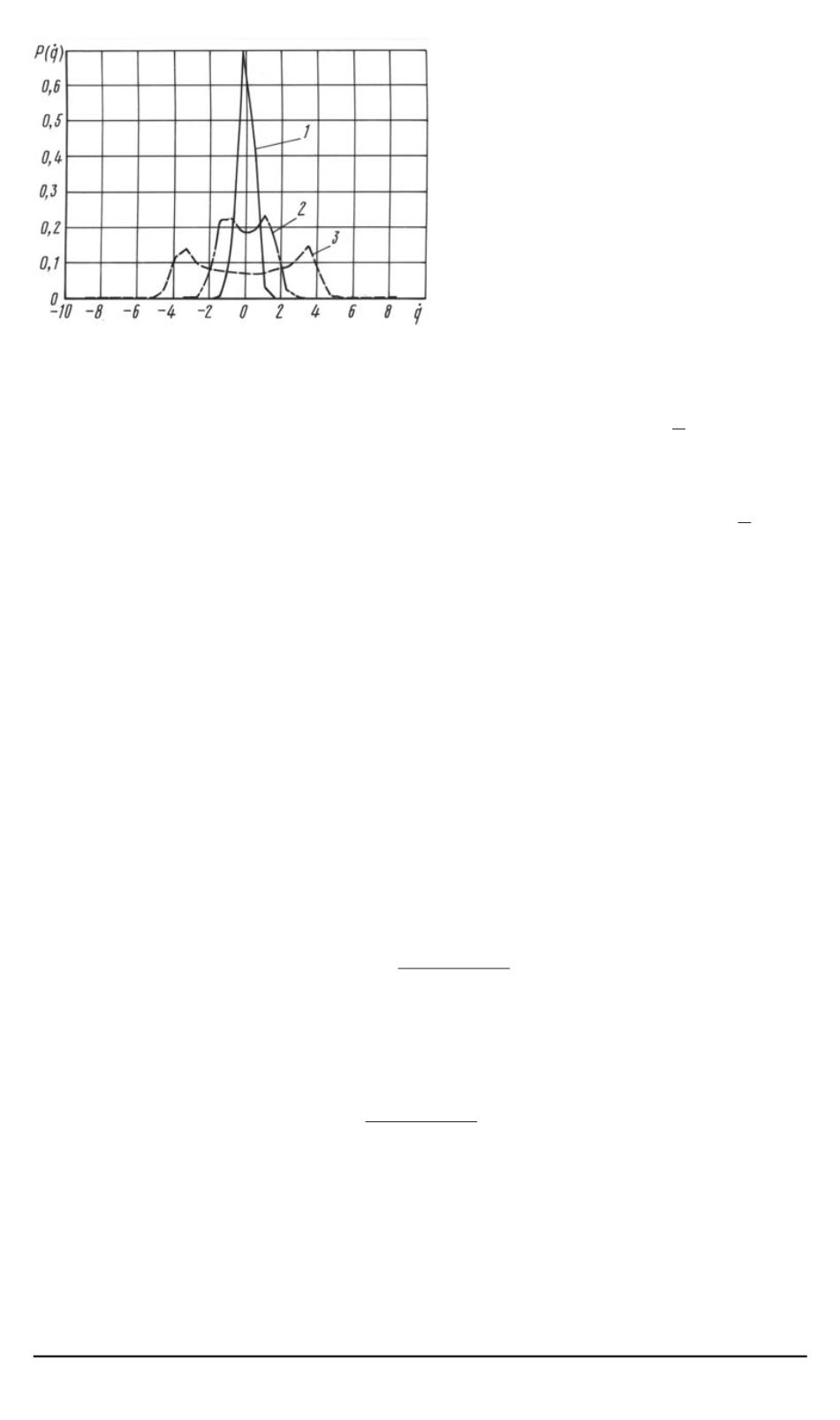
Рис. 2. Плотность вероятности суммы
случайной ошибки измерения, флукту-
ации отраженного сигнала и синусои-
дального сигнала с равномерно распре-
деленной начальной фазой:
1
,
2
,
3
—
A
ц
= 0
;
2
g
;
4
g
соответственно
и флуктуацией отраженного сиг-
нала, называемой “беганием”
блестящей точки, корреляцион-
ная функция которой имеет вид
R
ξ
2
(
τ
) =
σ
2
ξ
2
е
−
α
|
τ
|
.
Среднее значение и корреля-
ционная функция сигнала, ха-
рактеризующего маневр объек-
та, выражаются как
M
[
a
ц
(
t
)] =
A
ц
sin(Ω
ц
t
+
ϕ
)
,
M
[
a
ц
(
t
)
a
ц
(
t
+
τ
)] =
1
2
A
2
ц
cos Ω
ц
t,
где
A
ц
— амплитуда маневра;
Ω
ц
— угловая частота;
ϕ
— равномерно распределенная фаза;
τ
и
1
2
A
2
ц
—
время и уровень корреляции нормальной перегрузки объекта при ма-
невре.
Плотность вероятности угловой скорости линии визирования
˙
q
при
воздействии суммы сигналов для различныхамплитуд маневра приве-
дена на рис. 2.
Начальное состояние является случайным вектором с характери-
стиками
M
[
x
1
(
t
0
)] =
M
[
x
2
(
t
0
)] = 0;
M x
2
1
(
t
0
) = 0;
M x
2
2
(
t
0
) =
σ
2
V
.
Здесь
σ
2
V
— дисперсия ошибки определения скорости сближения. В
процессе сближения с объектом происходит непрерывное измерение
угловой скорости линии визирования
˙
q
. Принимается, что
|
˙
q
|
1
, и
поэтому
˙
q
(
t
) =
x
1
V
(
t
f
−
t
)
2
,
где
t
f
— время окончания процесса наведения.
Измерения подвержены случайным помехам и уравнение наблю-
дения имеет вид
Z
=
x
1
V
(
t
f
−
t
)
2
+
ν,
где
ν
=
ξ
1
+
ξ
2
— случайный процесс с заданной интенсивностью
σ
2
ξ
1
+
σ
2
ξ
2
е
−
α
|
τ
|
и нулевым математическим ожиданием;
V
— скорость
сближения ЛА и объекта.
Состояние системы описывается дифференциальным уравнением
˙
x
=
Ax
+
Bu
+
w,
28 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 2


