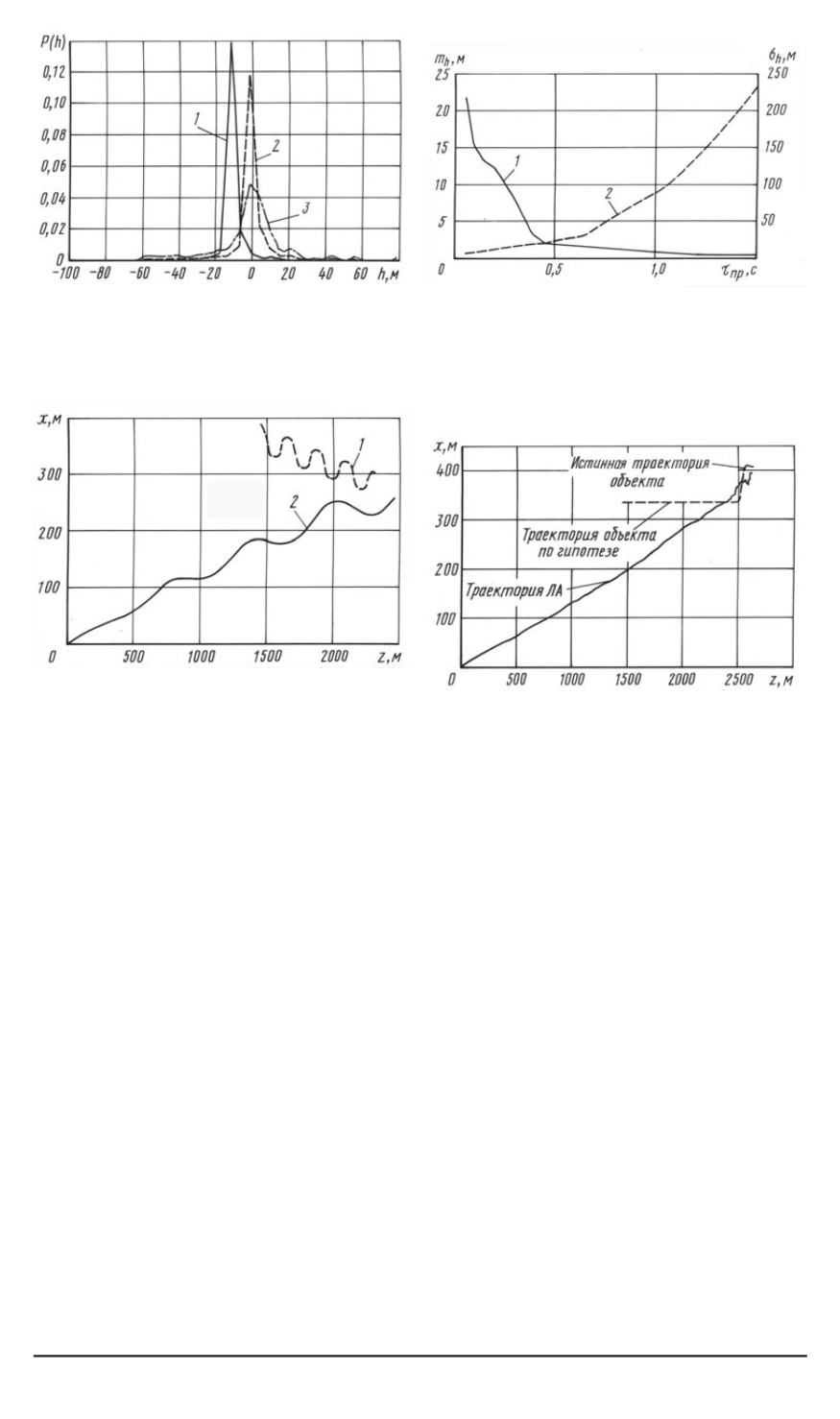
Рис. 6. Плотность вероятности прома-
ха
p
(
h
)
для различных значений вре-
мени
τ
р
при
A
ц
= 4
g
:
1
,
2
,
3
— см. рис. 5
Рис. 7. Изменения среднего значения
m
h
(
1
) и среднеквадратичного откло-
нения
σ
h
(
2
) ошибки наведения по вре-
мени прогнозирования
Рис. 8. Траектории движения объекта
(
1
) и ЛА (
2
); объект совершает маневр
с перегрузкой, имеющей синусоидаль-
ный закон
Рис. 9. Процесс наведения ЛА по
прогнозируемой траектории движения
объекта
окружающей среды. Показано, что плотность вероятности промаха
является бимодальной.
2. Выявлено, что синтез оптимального управления по критерию
минимума среднего квадрата промаха не является адекватным.
3. Предложен новый метод самонаведения, основанный на гипо-
тезе движения объекта на начальном этапе, построенного как среднее
синусоидального маневра по текущим измерениям, и использовании
прогноза реального положения объекта на конечном этапе. Переход на
самонаведение на конечном участке осуществляется на основе оценки
прогнозированного промаха, дальности до объекта, скорости сближе-
ния и располагаемой перегрузки ЛА.
4. Решена задача определения плотности вероятности угловой ско-
рости линии визирования на основе прогноза ее поведения методом
Тейла–Вейджа. Показано, что плотность вероятности изменения угло-
вой скорости линии визирования близка к нормальной.
5. Разработан алгоритм синтеза оптимального управления на осно-
ве прогнозирования траектории движения объекта с использованием
38 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 2


