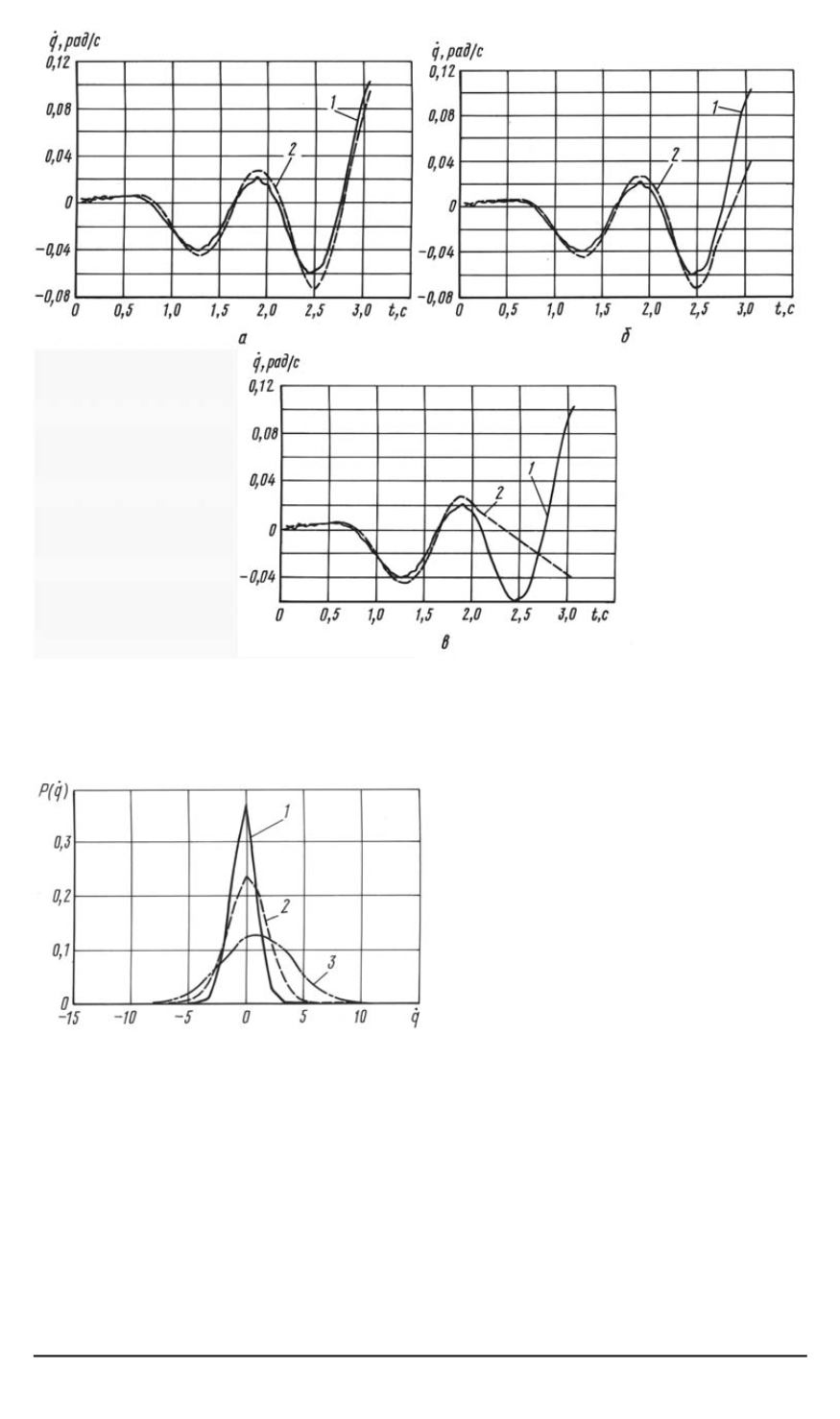
Рис. 4. Угловая скорость (реальная
1
) линии визирования “ЛА–объект” и ее
прогнозируемое значение (
2
) для разных интервалов прогнозирования:
а
— 0,3 с;
б
— 0,5 с;
в
— 1 с
Рис. 5. Плотность распределения вероят-
ности угловой скорости линии визиро-
вания “ЛА–объект” для различных ин-
тервалов времени прогнозирования при
A
ц
= 4
g
:
1
,
2
,
3
— для 0,3 с; 0,5 с; 1 с
управления на интервале време-
ни прогнозирования
τ
пр
, обеспе-
чивающего в том числе получе-
ние нормального распределения
плотности вероятности промаха
в точке встречи.
Этот алгоритм синтеза зако-
на оптимального управления на
основе прогнозирования траек-
тории объекта рассмотрим с ис-
пользованием модифицирован-
ного скалярного оценивания.
Уравнения (1) при условии,
что нормальное ускорение объ-
екта
a
ц
считается входным возмущением и его влияние представлено
в оценкахкоординат вектора состояния
ˆ
x
1
,
ˆ
x
2
и
ˆ
x
3
, можно представить
в виде
˙ˆ
x
1
= ˙ˆ
x
2
; ˙ˆ
x
2
= ˙ˆ
x
3
; ˙ˆ
x
3
= (1
/T
ЛА
)ˆ
x
3
+ (1
/T
ЛА
)
u.
36 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 2


