














 3 / 14
3 / 14

Интерфейс общения с сервисным медицинским роботом
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 1
37
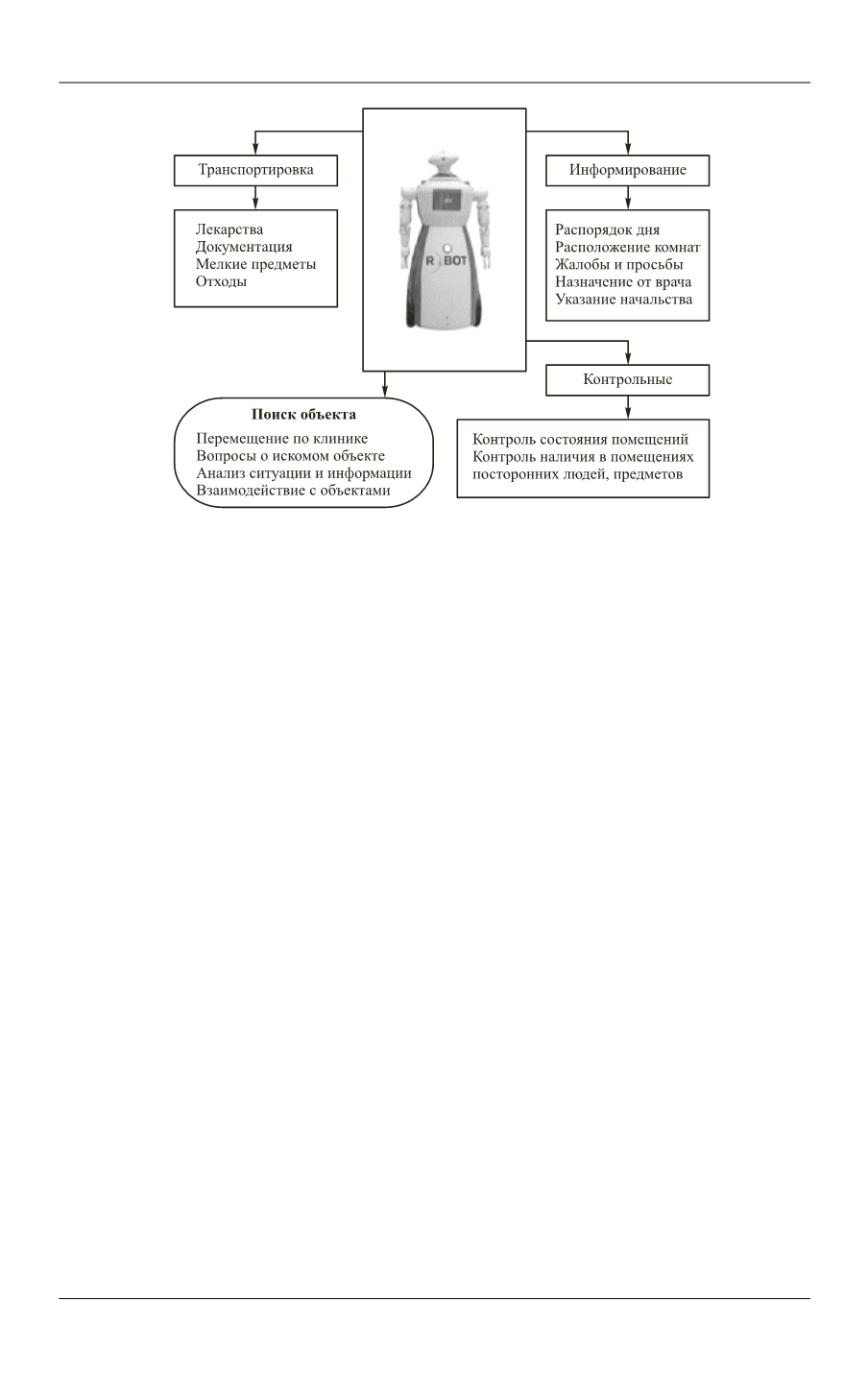
Рис. 1.
Транспортные, информационные, поисковые и контрольные функции
сервисных медицинских роботов в клинике
Наиболее необходимые медперсоналу функции назначения АМСР — транс-
портные, поисковые, информационные и контрольные. Робот функционирует в
условиях замкнутых и известных ему помещений внутри клиники, решая «ин-
теллектуально» ситуационные задачи в переменной внешней среде путем поис-
ка заданных объектов взаимодействия (врач, пациент, другой робот), которые
заложены в него в виде наборов переменных для опознания и взаимодействия,
установления последовательных контактов с ними и обмена информацией, а
также мелкими предметами. Робот перемещается по клинике, стремясь к реше-
нию поставленной ему оператором (врачом, пациентом) конкретной задачи в
заданный отрезок времени. По мере его движения возникают переменные ситу-
ации, включая нештатные ситуации, которые АМСР должен решать автономно,
без участия оператора, ставя себе промежуточные ситуационные цели и подза-
дачи и формируя ситуационную стратегию поведения и ситуационные целевые
функции (обход препятствия, подзарядка аккумулятора, поиск отсутствующего
в требуемом месте объекта и др.). В крайнем случае неразрешимой для АМСР
ситуации, робот может полностью остановиться и выдать сигнал бедствия (бес-
помощности).
По определению данный тип роботов относится к интеллектуальным робо-
там класса «А», так как является практически автономным и решает поставлен-
ную ему человеком в общем виде задачу в изменяемом внешнем мире за счет
высокой степени мобильности, полноценного восприятия необходимой внеш-
ней информации, ее оценки, анализа, принятия решения и т. д. [14]. Управление
таким АМСР должно быть возложено на некую внутреннюю ИСУ, которая так-
же должна получать команды через интерфейс. Следовательно, возникает до-