














 10 / 18
10 / 18

аналог вида
l
X
i
=1
R
i
h
2
∞
([Γ
i
(
x
(
t
1
)) ; Γ
i
(
x
(
t
1
))]
,
[
−
ξ
i
;
ξ
i
])
,
(6)
где
h
∞
([
a
]
,
[
b
]) =
h
min(
h
0
∞
([
a
]
,
[
b
])
, h
0
∞
([
a
]
,
[
b
]))
,
max(
h
0
∞
([
a
]
,
[
b
])
,
h
0
∞
([
a
]
,
[
b
]))
i
— метрика Хаусдорфа;
h
0
∞
([
a
]
,
[
b
]) = inf
n
r
|
[
a
]
⊆
[
b
] +
+ [
−
r
;
r
]
, r
≥
0
o
— мера близости интервалов;
R
i
— параметры
штрафных функций;
ξ
i
>
0
— допустимая погрешность выполнения
конечного условия, задаваемая пользователем.
Искомое оптимальное программное управление предлагается ис-
кать в двух различных классах функций: кусочно-постоянных и
кусочно-линейных. Поскольку выполняется поиск наилучшего упра-
вления в каждом классе, не совпадающем с классом кусочно-непре-
рывных функций, найденное управление является субоптимальным,
рассматриваемым в качестве кандидата в решение задачи. При ре-
шении задачи применяется интервальный метод, поэтому каждому
описанному управлению сопоставляется интервальный аналог, зада-
ваемый интервальным вектором.
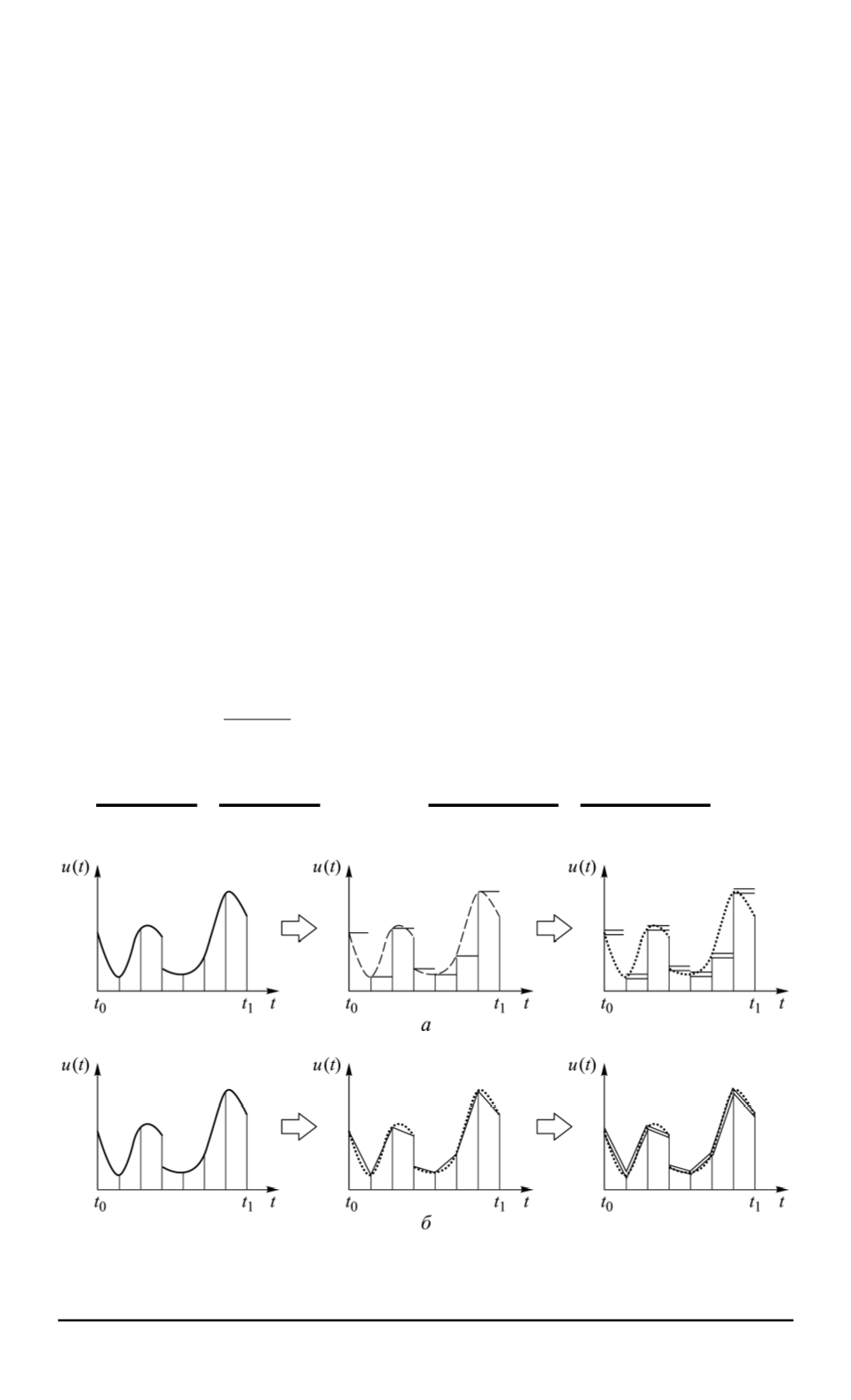
Для кусочно-постоянного интервального управления (рис. 2,
а
)
необходимо задать значения функции
u
(
t
)
в
N
моментах време-
ни
τ
i
=
t
0
+
t
1
−
t
0
N
i
,
i
= 0
, . . . , N
−
1
, т.е. управлению можно
однозначно поставить в соответствие интервальный вектор
[
u
] =
= [
u
1
(
τ
0
)]
×
. . .
×
[
u
q
(
τ
0
)]
|
{z
}
[
u
(
τ
0
)]
×
. . .
×
[
u
1
(
τ
N
−
1
)]
×
. . .
×
[
u
q
(
τ
N
−
1
)]
|
{z
}
[
u
(
τ
N
−
1
)]
. Тогда
Рис. 2. Замена кусочно-непрерывного управления интервальным кусочно-
постоянным (
а
) и кусочно-линейным (
б
) управлениями
42 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 1