














 13 / 18
13 / 18

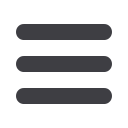
Рис. 3. Зависимости изменения компонент векторов состояния
x
1
(
1
) и
x
2
(
2
) (
а
)
и управления
u
(
б
), найденные в работах [15, 16] и с помощью разработанного
алгоритма в случае кусочно-постоянного (
в
) и кусочно-линейного (
г
) управле-
ний
Задача преследования
.
Рассмотрим решение задачи преследования
в трехмерном пространстве [17]. Поведение модели объекта управле-
ния описывается системой дифференциальных уравнений
˙
x
(
t
) =
V
x
(
t
)
,
˙
V
x
(
t
) =
u
x
(
t
)
,
˙
x
t
(
t
) =
V
t
x
(
t
)
,
˙
V
t
x
(
t
) =
u
t
x
(
t
)
,
˙
y
(
t
) =
V
y
(
t
)
,
˙
V
y
(
t
) =
u
y
(
t
)
,
˙
y
t
(
t
) =
V
t
y
(
t
)
,
˙
V
t
y
(
t
) =
u
t
y
(
t
)
,
˙
z
(
t
) =
V
z
(
t
)
,
˙
V
z
(
t
) =
u
z
(
t
)
,
˙
z
t
(
t
) =
V
t
z
(
t
)
,
˙
V
t
z
(
t
) =
u
t
z
(
t
)
,
(8)
где
r
= (
x, y, z
)
т
,
r
t
= (
x
t
, y
t
, z
t
)
т
— радиус-векторы, описывающие
положение перехватчика и цели;
V
= (
V
x
, V
y
, V
z
)
т
,
V
t
=
V
t
x
, V
t
y
, V
t
z
т
—
векторы скоростей перехватчика и цели;
u
= (
u
x
, u
y
, u
z
)
т
,
u
t
=
=
u
t
x
, u
t
y
, u
t
z
т
— ускорения перехватчика (управления) и цели.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 1 45