














 15 / 18
15 / 18

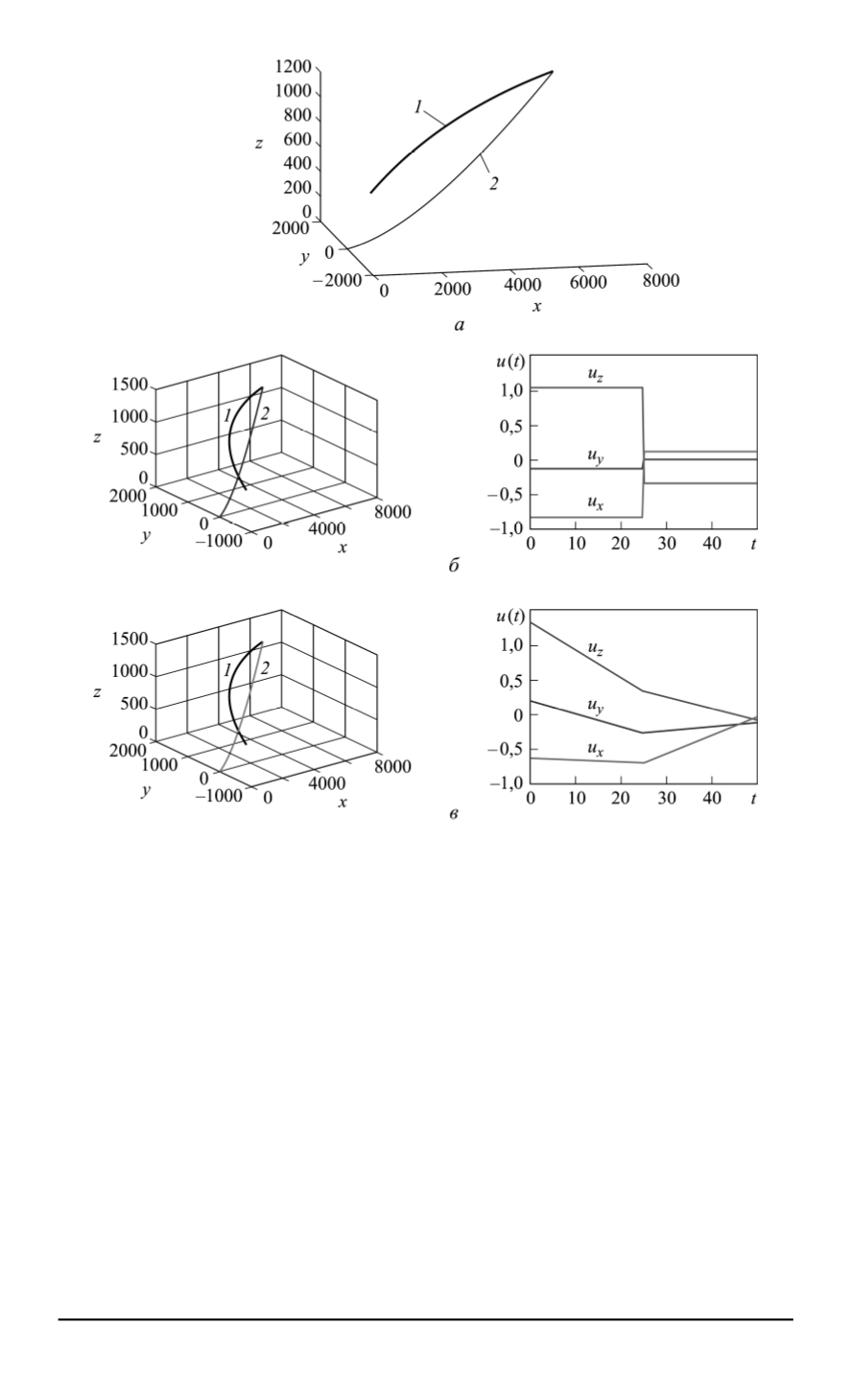
Рис. 4. Зависимость движения цели и перехватчика, полученная с помощью ал-
горитма пропорциональной навигации [17] (
а
), зависимости движения цели и
перехватчика, законов изменения управления, найденные с помощью разрабо-
танного алгоритма при кусочно-постоянном (
б
) и кусочно-линейном (
в
) упра-
влениях
тельствует о близости полученных результатов. Максимальное сум-
марное отклонение цели и перехватчика
Δ = Δ
x
+ Δ
y
+ Δ
z
= 0
,
09 +
+ 0
,
14 + 0
,
07 = 0
,
3
для кусочно-постоянного управления и
Δ = Δ
x
+
+ Δ
y
+ Δ
z
= 0
,
06 + 0
,
08 + 0
,
14 = 0
,
28
для кусочно-линейного
управления, что соответствует требованиям, предъявляемым к точно-
сти решения задачи преследования. Здесь
Δ
y
= max
|
y
(
t
1
)
−
y
t
(
t
1
)
|
,
Δ
z
= max
|
z
(
t
1
)
−
z
t
(
t
1
)
|
— погрешности выполнения терминальных
условий по каждой координате. Кусочно-линейное управление пред-
почтительнее по функционалу, чем кусочно-постоянное (см. табл. 2),
поскольку приводит к меньшим значениям ширины интервала не-
определенностей значений критерия оптимальности. Отметим, что
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 1 47