Таблица 4
Результаты оптимизации на такте № 2
Численности
Доли
Показатели
Х
1
Х
2
Х
3
Х
4
Q
1
Q
2
J
A
J
B
Начало 4 2 15 7
X
1
→
X
3
X
3
→
X
1
Нэш 0 1 8 4 0,81658 0,89722 0,31715 0,46641
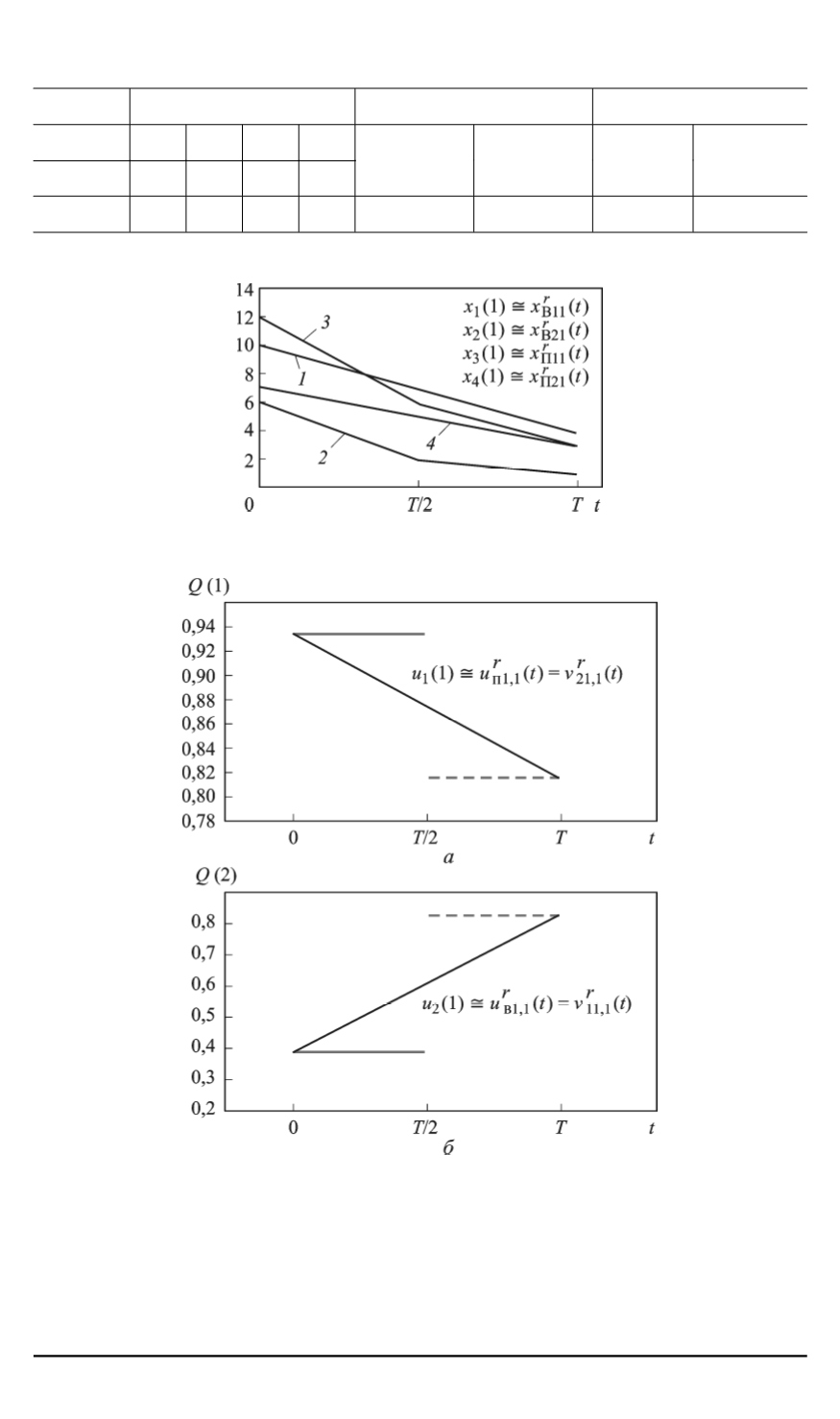
Рис. 2. Изменение вектора состояний
Рис. 3. Изменение доли средств ЛС ПВО
Q
(1)
u
r
п
2
,
1
= 1
−
u
r
п
1
,
1
=
ν
r
22
,
1
(
t
)
(
а
) и
Q
(2)
u
r
в
2
,
1
= 1
−
u
r
в
1
,
1
=
ν
r
12
,
1
(
t
)
(
б
)
По результатам моделирования получились зависимости, предста-
вленные на рис. 5, 6 и 7.
14 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 4


