Эффективности воздействия объектов
i
-го типа на объекты
j
-го
типа:
P
31
=
P
32
=
P
13
=
P
14
= 0
,
5
.
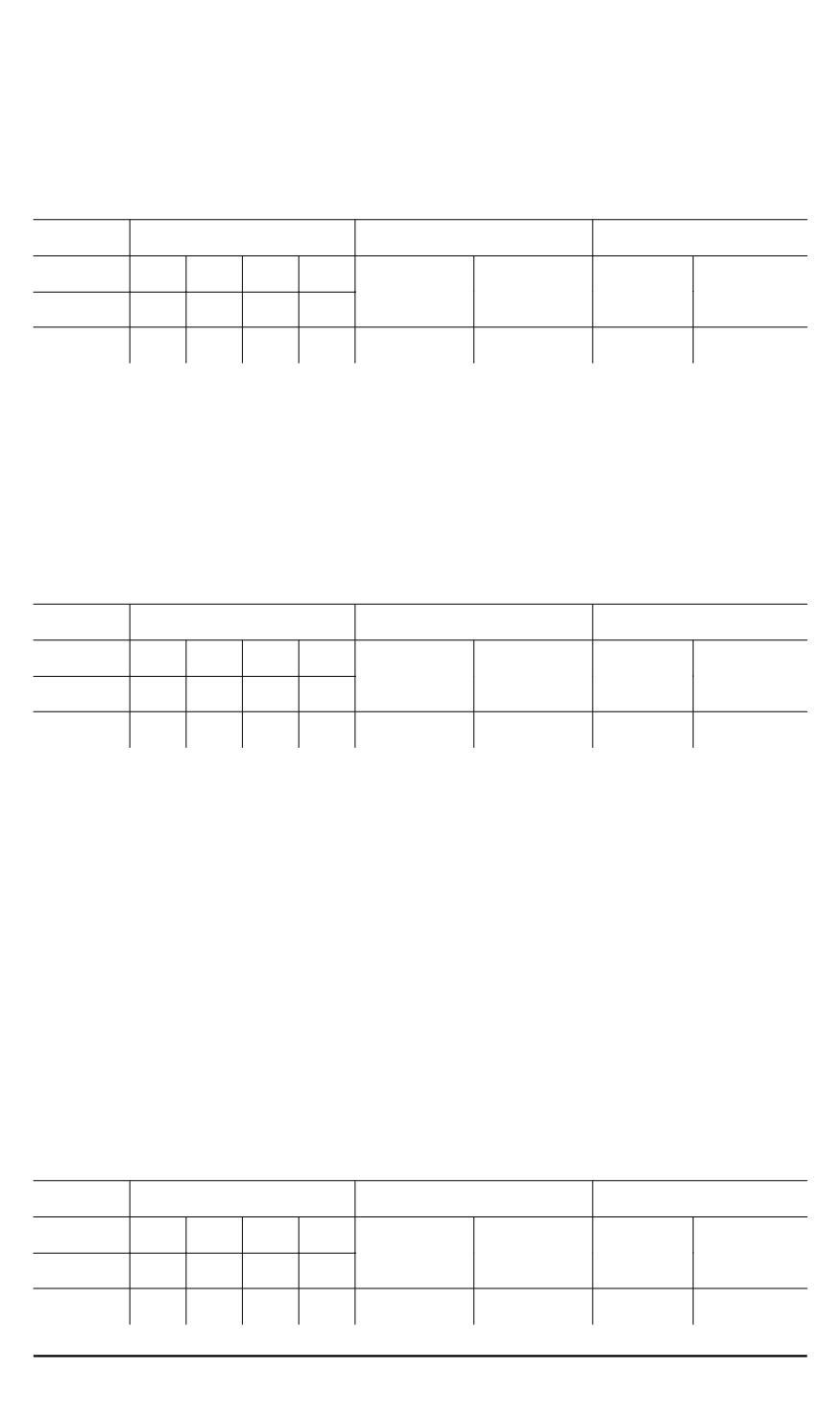
Таблица 1
Результаты оптимизации на такте № 1
Численности
Доли
Показатели
Х
1
Х
2
Х
3
Х
4
Q
1
Q
2
J
A
J
B
Начало 10 6 12 7
X
1
→
X
3
X
3
→
X
1
Нэш 7 2 6 5 0,93545 0,38267 0,47651 0,43709
В табл. 1–4 ячейкa
Q
1
имеет смысл доли активных средств
X
1
,
воздействующих на активные средства противодействующей стороны
X
3
, а
Q
2
— доли активных средств
X
3
, воздействующих на активные
средства противодействующей стороны
X
1
.
Таблица 2
Результаты оптимизации на такте № 2
Численности
Доли
Показатели
Х
1
Х
2
Х
3
Х
4
Q
1
Q
2
J
A
J
B
Начало 77 2 6 5
X
1
→
X
3
X
3
→
X
1
Нэш 4 1 3 3 0,81566 0,83623 0,42607 0,49486
По результатам моделирования получились зависимости, предста-
вленные на рис. 2, 3 и 4.
Эксперимент № 2.
Рассмотрим влияние количественного превосходства ПВО.
Начальные численности
X
1
= 12
, X
2
= 10
, X
3
= 30
, X
4
= 10
.
Эффективности воздействия объектов
i
-го типа на объекты
j
-го типа
P
31
=
P
32
=
P
13
=
P
14
= 0
,
5
.
Таблица 3
Результаты оптимизации на такте № 1
Численности
Доли
Показатели
Х
1
Х
2
Х
3
Х
4
Q
1
Q
2
J
A
J
B
Начало 12 10 30 10
X
1
→
X
3
X
3
→
X
1
Нэш 4 2 15 7 0,91727 0,49422 0,46431 0,39945
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 4 13


