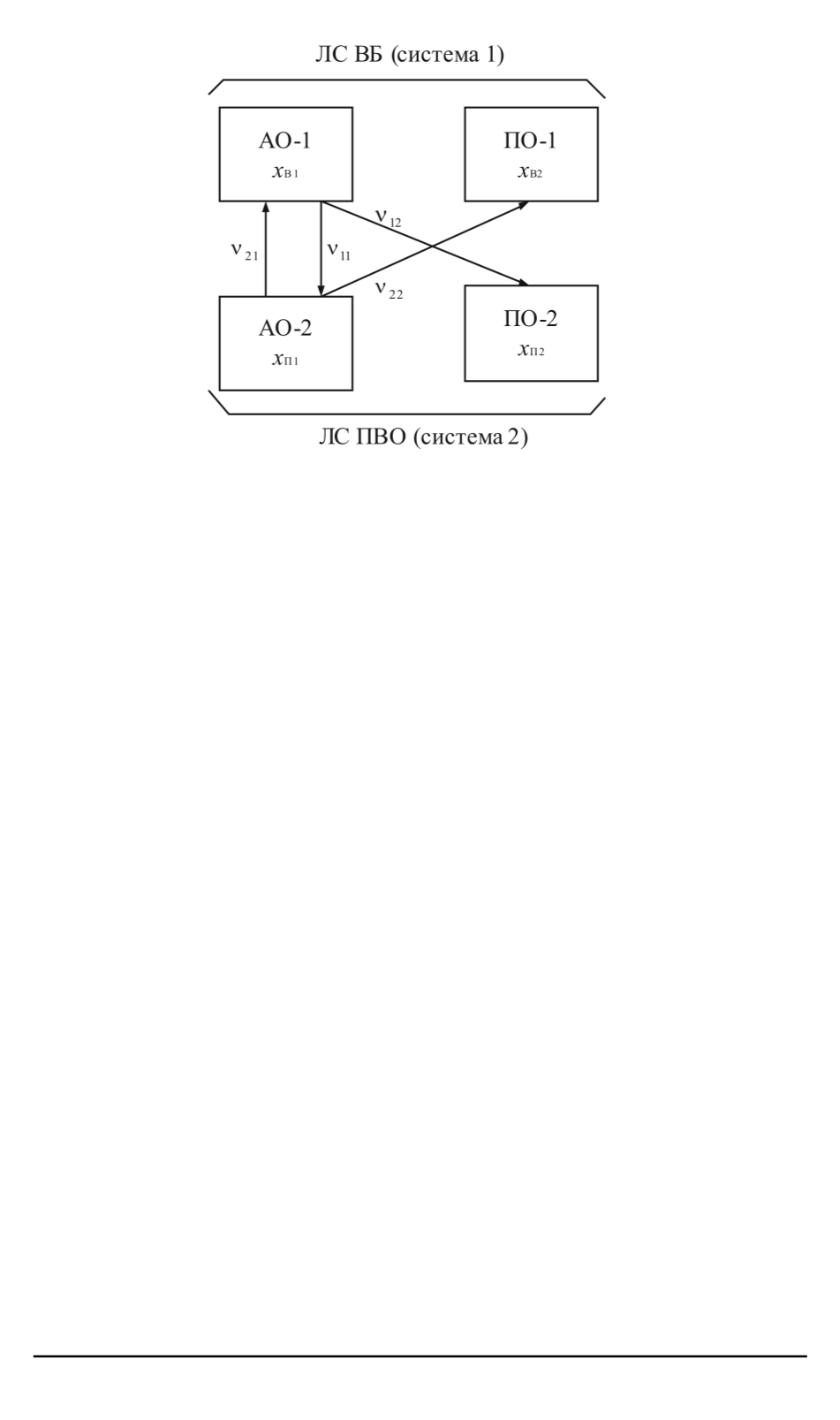
Рис. 1. Структура конфликтной ситуации
ского процесса перехода из одного состояния в другое (“не поражен”–
“поражен”) единичного объекта под влиянием потока случайных со-
бытий с пуассоновским законом распределения. Характеристикой со-
стояния систем ЛС ВБ, ЛС ПВО становится средняя численность
x
в1
(
t
)
, x
в2
(
t
)
и
x
п1
(
t
)
, x
п2
(
t
)
соответственно объектов, находящих-
ся в состоянии “не поражен” (так как число пораженных объектов —
это разность
x
в1
(
t
0
)
−
x
в1
(
t
)
, . . . , x
п2
(
t
0
)
−
x
п2
(
t
)
) с дисперсией [8]
σ
2
α
(
t
) =
x
α
(
t
) (1
−
x
α
(
t
)
/x
α
(
t
0
))
, α
=
в1, в2, п1, п2
;
t
0
≤
t
≤
t
k
,
(1)
где
t
— момент времени (мгновенный такт) непрерывного залпового
обмена подгрупп АО-1, АО-2 противодействующих сторон. При этом,
как известно, истинные текущие численности
x
и
α
(
t
)
принадлежат до-
верительным интервалам:
x
α
−
3
σ
α
≤
x
и
α
≤
x
α
+ 3
σ
α
.
Непрерывному варианту конфликта со структурной схемой, при-
веденной на рис. 1, соответствует система уравнений динамики кон-
фликта следующего вида:
˙
x
в1
(
t
) =
−
P
в1
п1
a
п1
ν
21
x
п1
(
t
)
−
ν
0
в1
x
в1
(
t
);
˙
x
в2
(
t
) =
−
P
в2
п1
a
п1
ν
22
x
п1
(
t
)
−
ν
0
в2
x
в2
(
t
);
˙
x
п1
(
t
) =
−
P
п1
в1
a
в1
ν
11
x
в1
(
t
)
−
ν
0
п1
x
п1
(
t
);
˙
x
п2
(
t
) =
−
P
п2
в1
a
в1
ν
12
x
в1
(
t
)
−
ν
0
п2
x
п2
(
t
)
,
(2)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 4 5


