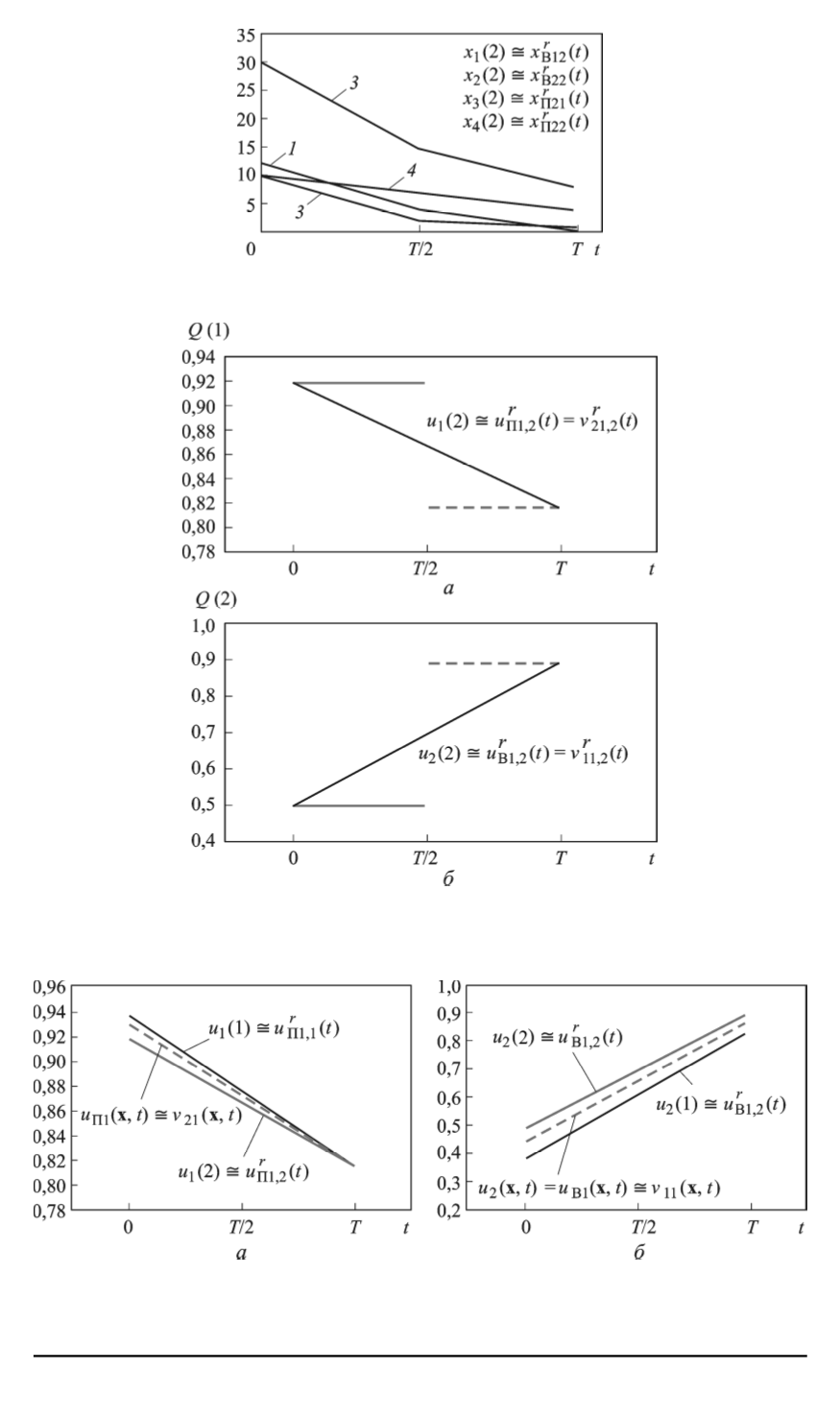
Рис. 4. Изменение вектора состояний
Рис. 5. Изменение доли средств ЛС ПВО
Q
(1)
и ЛС ВБ
Q
(2)
:
а
—
u
r
п2,2
= 1
−
u
r
п1,2
=
ν
r
22
,
2
(
t
)
;
б
—
u
r
в2,2
= 1
−
u
r
в1,2
=
ν
r
12
,
2
Рис. 6. Временн´aя реализация для управления
u
п
1
(x
, t
) (
u
п
2
(x
, t
) = 1
−
−
u
п
1
(x
, t
) =
ν
22
(x
, t
))
(
а
) и
u
в
1
(x
, t
) (
u
в
2
(x
, t
) = 1
−
u
в
1
(x
, t
) =
ν
12
(x
, t
))
(
б
)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 4 15


