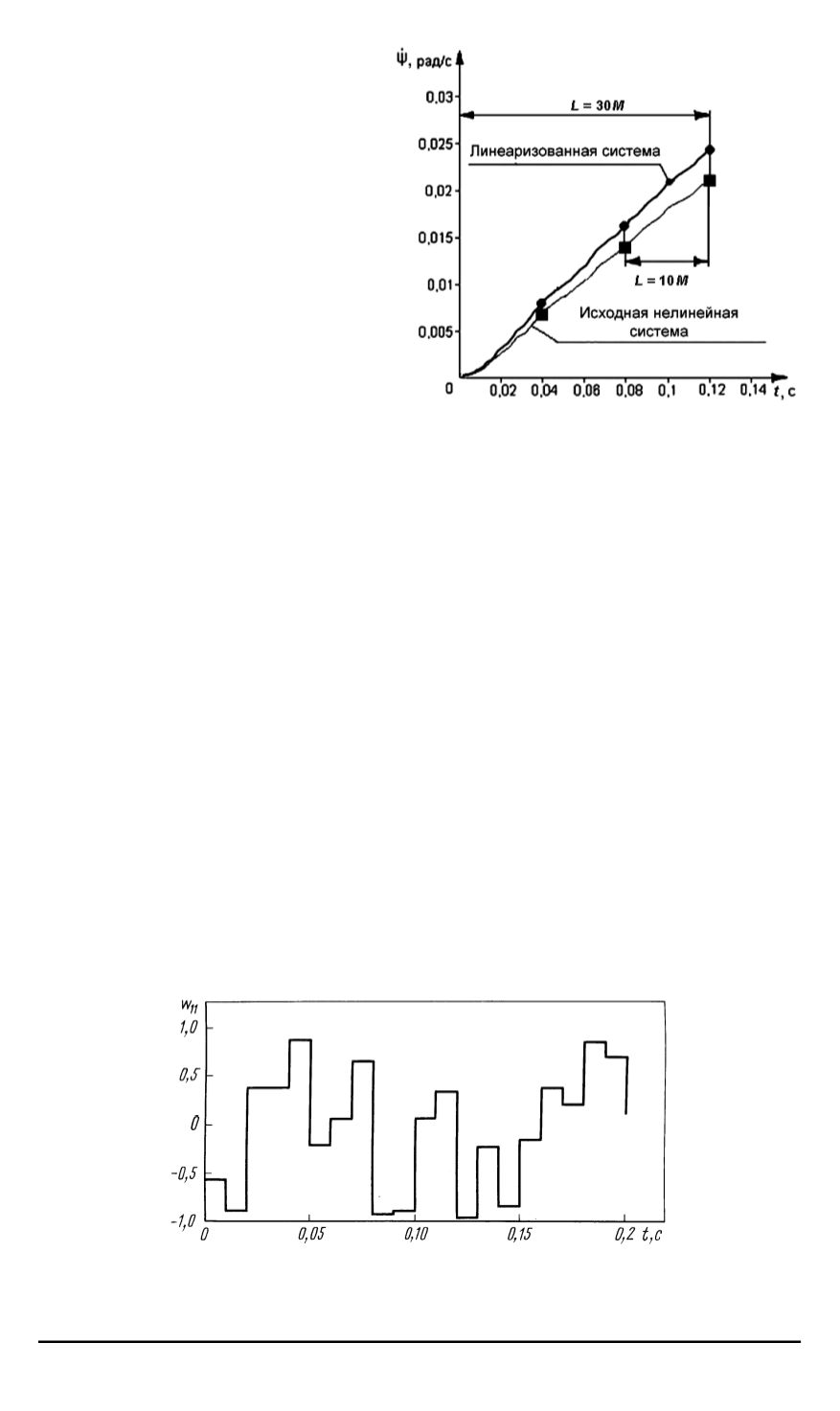
Рис
. 5.
Модель движения исходной нели
-
нейной и линеаризованной систем для раз
-
личных значений
L
:
¥
,
•
—
экспериментальные данные
представляется совокупно
-
стью моделей
[8],
полученной
методом
“
замороженных
”
ко
-
эффициентов из теории неста
-
ционарных систем
.
Пусть
S
—
интервал вре
-
мени
,
соответствующий про
-
граммному быстродействию
цифрового вычислителя
.
Вы
-
берем фиксированные интер
-
валы времени
M
и
L
,
такие что
L > M > S
;
здесь
L
—
интер
-
вал дискретизации
,
выбором
величины которого обеспечи
-
вается соответствие получен
-
ного линеаризованного объек
-
та
(2)
исходному нелинейному
.
Параметры опорного движения выбираются на каждом интервале
L
,
чтобы величины рассогласования параметров движения линеаризо
-
ванной системы и опорного движения находились в заданных преде
-
лах
.
Результаты моделирования линеаризованных систем при
L
= 10
M
представлены на рис
. 5.
Таким образом
,
исходная и полученная системы совпадают с точ
-
ностью до
8 %
на интервале времени
L
.
Поскольку с увеличением ин
-
тервала дискретизации
L
рассогласование достигает
25 %,
то целесо
-
образно принять
L
= 10
M
.
Примем за внешнее возмущающее воздействие равномерно распре
-
дел
e
нный случайный сигнал
,
ограниченный по величине от
−
1
до
1
согласно стандартной постановке задачи
[1] (
рис
. 6).
Рис
. 6.
Случайный компонент внешнего возмущения
ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Приборостроение
". 2004.
№
4 51


