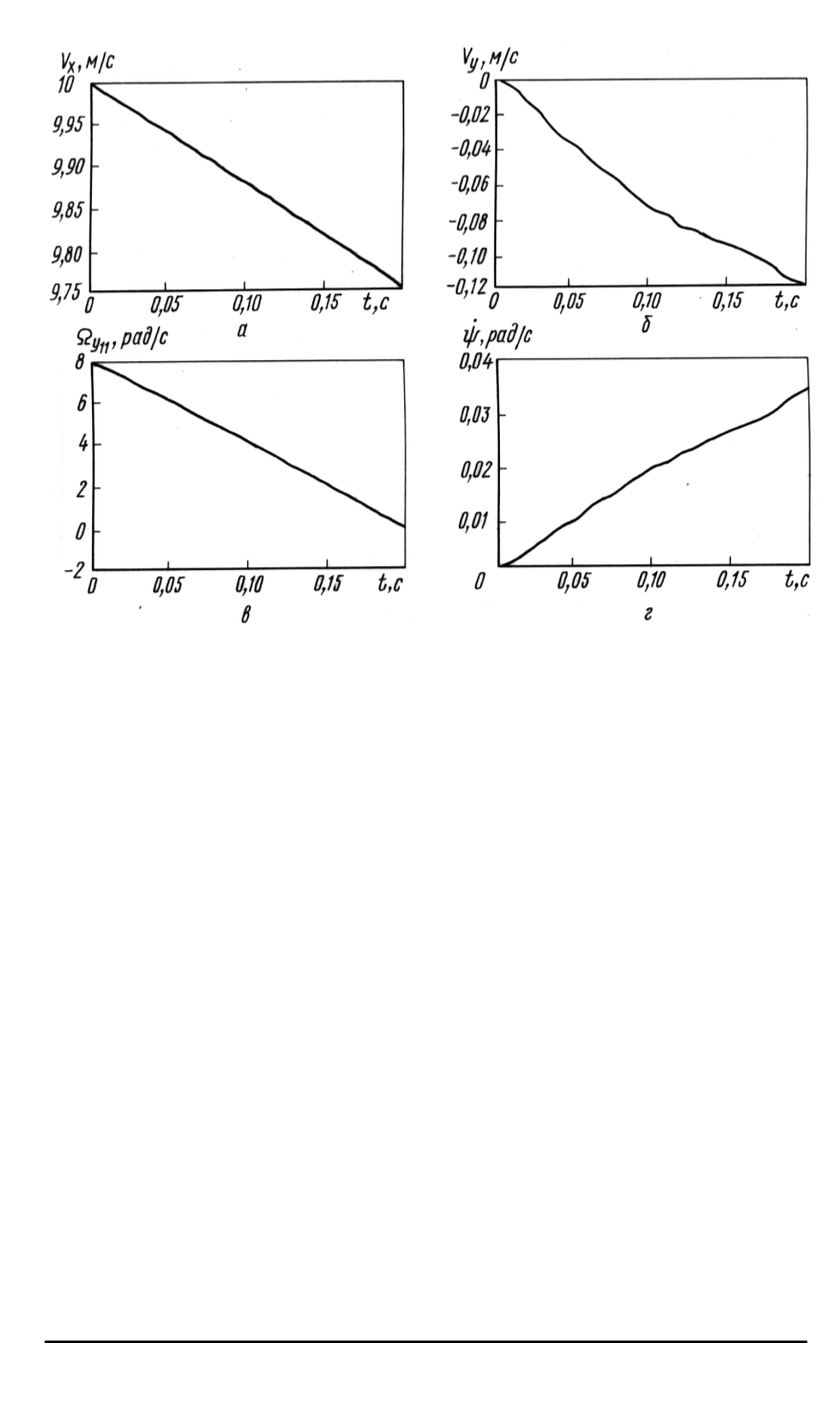
Рис
. 4.
Опорная траектория движения исходной упрощенной системы
:
V
x
(
a
),
V
y
(
б
),
Ω
y
11
(
в
),
˙
ψ
(
г
)
Численный пример решения задачи
.
Данная методика разрабо
-
тана для описания линейных стационарных систем
.
Прежде всего не
-
обходимо линеаризовать исходную нелинейную систему уравнений
(1)
по отношению к отклонению от выбранной опорной траектории дви
-
жения
(
рис
. 4).
Результат линеаризации представляется в пространстве
состояний
.
Параметры опорной траектории получим путем интегрирования
упрощенных уравнений движения при следующих начальных услови
-
ях
:
V
C
x
= 10
м
/
с
;
V
C
y
= 0
м
/
с
;
˙Ω
yij
= 8
рад
/
с
;
Ω
yij
= 0
рад
;
ψ
= 0
рад
;
˙
ψ
= 0
рад
/
с
;
M
т
ij
= 1000
Н
/
м
;
K
т
ij
= 50
.
Параметры КТС
(
пассажирского автобуса
)
следующие
:
m
p
= 10
т
,
m
н
ij
= 100
кг для всех
i, j
;
R
= 25
см
;
J
= 100
т
·
м
2
;
J
yij
= 5
кг
·
м
2
;
А
1
= 5
м
;
А
2
= 4
,
5
м
;
E
1
=
E
2
= 2
м
;
∆
11
= ∆
21
;
∆
12
= ∆
22
.
Параметр
µ
является микстом
:
µ
= ∆
11
−
∆
22
= 0
,
9
.
Вследствие того
,
что опорная траектория непостоянна
,
в результа
-
те линеаризации получим линейную нестационарную систему
,
которая
50 ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Приборостроение
". 2004.
№
4


