где
x
=
h
V
C
x
V
C
y
Ω
yij
˙
ψ ψ
i
т
—
вектор состояния
;
u
и
w
—
векторы
управления и возмущения соответственно
:
u
=
£
u
т
11
u
т
12
u
т
21
u
т
22
¤
т
, w
=
£
˜
M
т
11
˜
M
т
12
˜
M
т
21
˜
M
т
22
¤
т
.
Пусть
z
a
=
£
˙
ψ V
C
y
¤
т
— “
вектор интересов потребителя
” (
вари
-
ант с двумя компонентами
),
˙
ψ
—
показатель интенсивности
“
закрут
-
ки
”,
V
C
y
—
показатель интенсивности бокового сноса
;
z
b
= ˙
ψ
— “
век
-
тор интересов потребителя
” (
вариант с одной компонентой
),
y
=
£
Ω
y
11
Ω
y
12
Ω
y
21
Ω
y
22
¤
т
—
вектор выхода
,
доступный для упра
-
вления
.
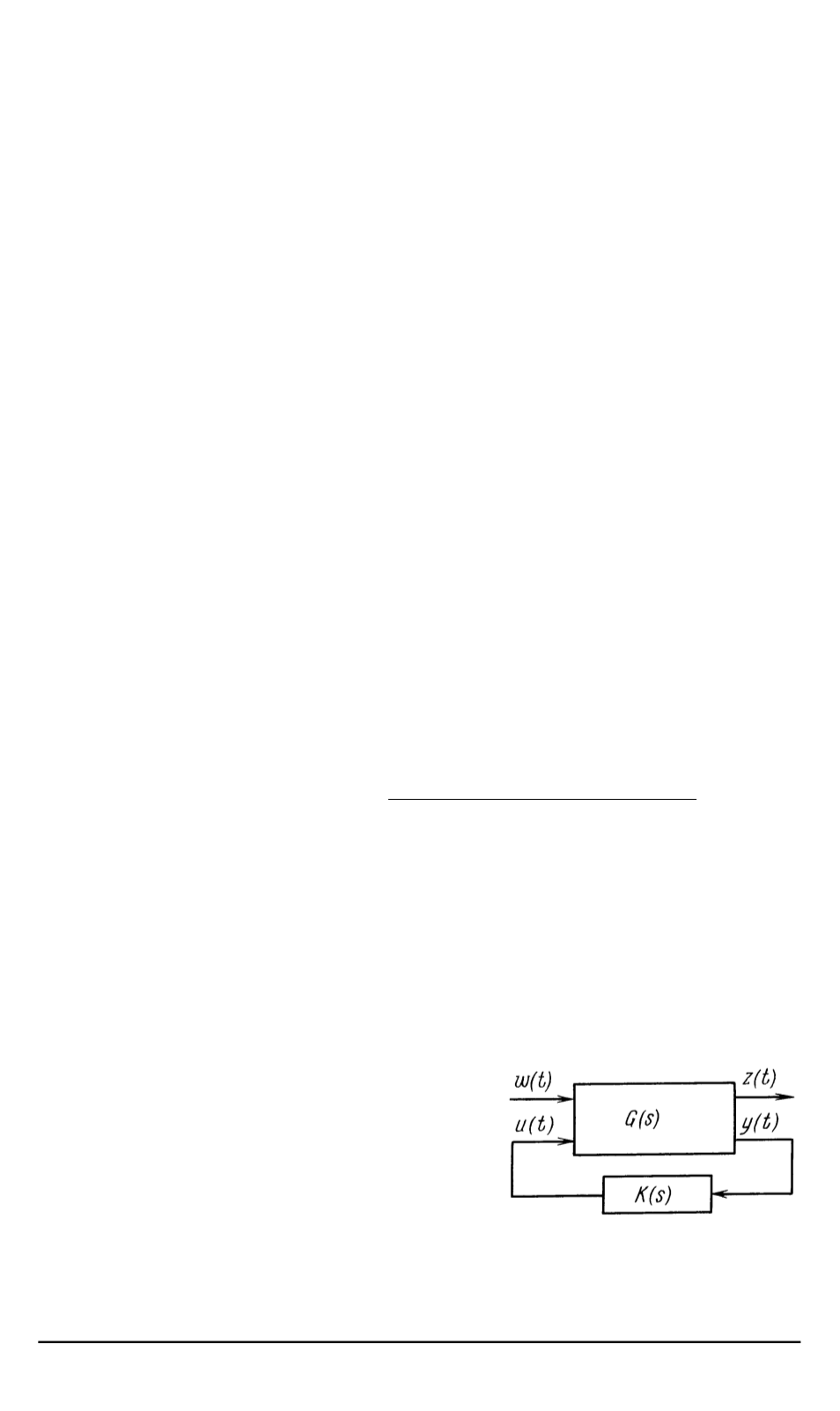
Общая постановка задачи
H
∞
-
оптимизации
.
Структурная схема
синтезируемой системы представлена на рис
. 3 [7].
На этом рисунке
G
(
s
) =
·
G
11
(
s
)
G
12
(
s
)
G
21
(
s
)
G
22
(
s
)
¸
=
·
G
w
z
(
s
)
G
u
z
(
s
)
G
w
y
(
s
)
G
u
y
(
s
)
¸
—
многомерная передаточная функция
(
МПФ
)
объекта оптимиза
-
ции
,
имеющая на входе вектор
£
w
(
t
)
т
u
(
t
)
т
¤
т
,
а на выходе
—
век
-
тор
£
z
(
t
)
т
y
(
t
)
т
¤
т
.
Например
,
G
11
(
s
)
≡
G
w
z
(
s
)
—
МПФ объекта от
возмущения
w
(
t
)
до контролируемой переменной
z
(
t
)
.
Система
G
(
s
)
замкнута регулятором
K
(
s
)
(
см
.
рис
. 3).
Пусть
T
w
z
(
s
)
—
МПФ замкнутой систмы
.
Тогда задачей
H
∞
-
опти
-
мизации является синтез такого регулятора
K
,
который бы минимизи
-
ровал
H
∞
-
норму
T
w
z
(
s
)
:
k
T
w
z
(
s
)
k
∞
def
= sup
c>
0
sup
ω
p
λ
max
T
w
т
z
(
c
−
jω
)
T
w
z
(
c
+
jω
);
здесь
s
=
c
−
jω
;
λ
max
—
максимальное собственное значение квадрат
-
ной матрицы
T
w
т
z
(
c
−
jω
)
T
w
z
(
c
+
jω
)
.
Показатель качества управления имеет вид
J
(
K
) =
k
T
w
z
(
s
)
k
∞
,
(
3
)
Рис
. 3.
Структурная схема син
-
тезируемой системы
а его оптимальное значение определяет
-
ся выражением
J
(
K
опт
) = inf
K
k
T
w
z
(
s
)
k
∞
=
γ
опт
.
При
J
(
K
опт
)
регулятор обеспечива
-
ет минимальное влияние возмущений
,
в
том числе и самых нежелательных
,
по
-
этому данная задача является минимакс
-
ной
.
ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Приборостроение
". 2004.
№
4 49


