i
зада
e
т переднюю
(
i
= 1)
и заднюю
(
i
= 2)
оси
,
а индекс
j
—
левую
(
j
= 1)
и правую
(
j
= 2)
стороны по ходу движения КТС
.
Примем следующие упрощения модели КТС
:
—
рессоры не имеют массы
;
—
масса подрессоренной части
m
p
сосредоточена в одной точке
C
p
;
—
стержни
,
которые вместе с колесами представляют неподрессо
-
ренную часть
,
не имеют массы и являются абсолютно ж
e
сткими
;
—
конструкция КТС такова
,
что
E
1
=
E
2
;
—
вращение колеса
ij
вокруг оси вращения зада
e
тся абсолютной
угловой скоростью
Ω
yij
.
Модель трения
.
Величина силы трения качения с проскальзывани
-
ем
,
приложенной
,
например
,
к колесу
11
в точке его касания с опорной
поверхностью
,
зависит от силы нормальной реакции со стороны до
-
рожного полотна
N
11
,
от типа покрытия
,
учитываемого коэффициентом
кулонова трения
ν
11
l
,
и от относительного проскальзывания
,
учитыва
-
емого функциями
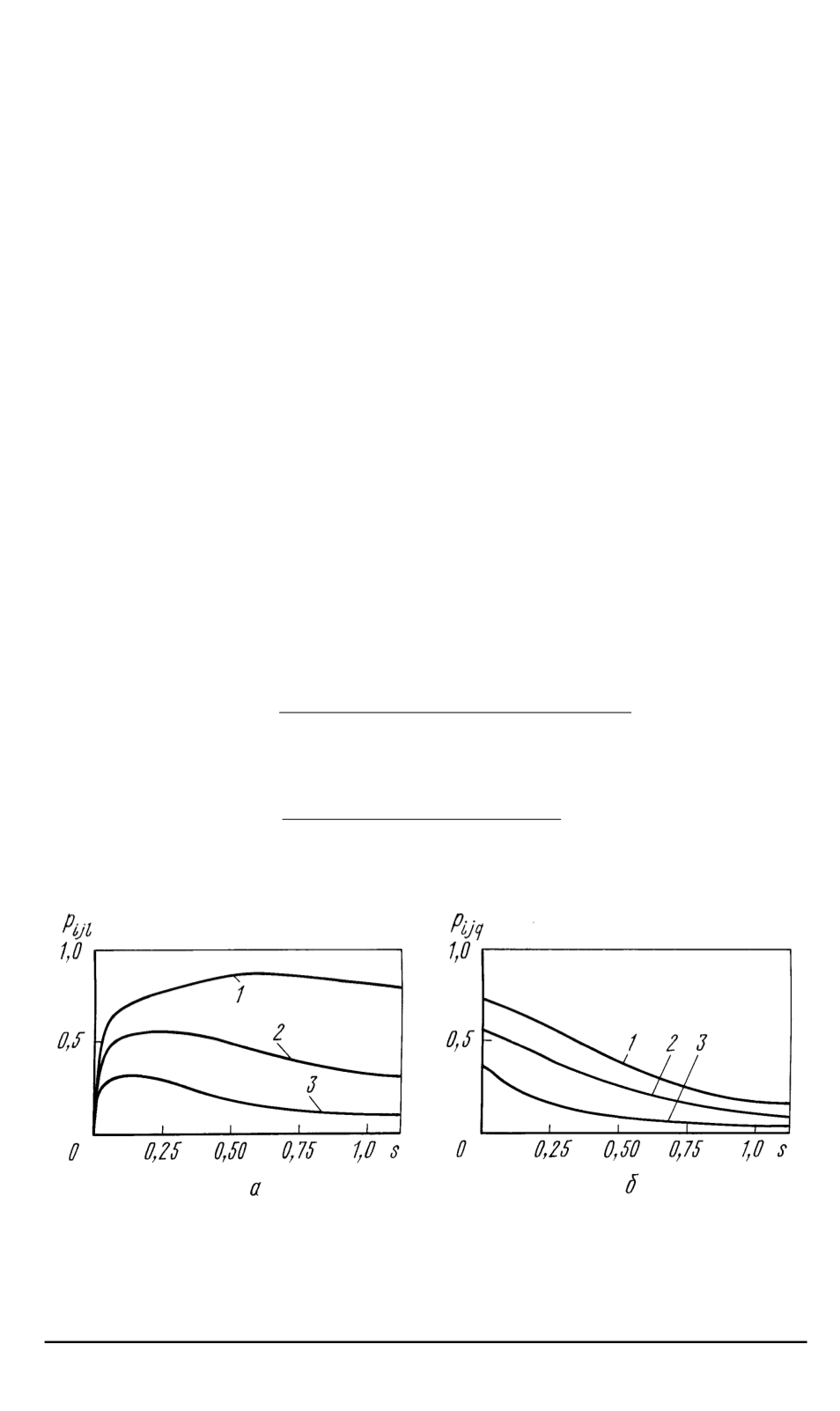
p
l
(
s
11
l
)
и
p
q
(
s
11
q
)
[5, 6] (
рис
. 2):
P
11
l
=
−
N
11
ν
11
l
p
l
(
s
11
l
)
, P
11
q
=
−
N
11
ν
11
q
p
q
(
s
11
q
)
.
Относительное проскальзывание для колеса
ij
вдоль осей
l
и
q
име
-
ет вид
s
ijl
=
¯ ¯ ¯
V
A
ij
x
cos
ψ
−
V
A
ij
y
sin
ψ
−
Ω
yij
R
¯ ¯ ¯
¯ ¯ ¯
V
A
ij
x
cos
ψ
−
V
A
ij
y
sin
ψ
¯ ¯ ¯
,
s
ijq
=
¯ ¯ ¯
−
V
A
ij
x
sin
ψ
+
V
A
ij
y
cos
ψ
¯ ¯ ¯
¯ ¯ ¯
V
A
ij
x
cos
ψ
−
V
A
ij
y
sin
ψ
¯ ¯ ¯
,
Рис
. 2.
Функции
,
учитывающие влияние относительного проскальзывания на
продольную
(
а
)
и поперечную
(
б
)
составляющие силы трения колеса в режиме
с проскальзыванием для случаев сухого
(
1
),
мокрого
(
2
)
и обледенелого
(
3
)
ас
-
фальта
46 ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Приборостроение
". 2004.
№
4


