=
·
A
+
γ
−
2
B
1
B
т
1
X
∞
+
B
2
F
∞
+
Z
∞
L
∞
C
2
−
Z
∞
L
∞
F
∞
0
¸
,
для которого
k
T
w
z
k
∞
< γ.
Предложенный алгоритм дает возможность построить лишь суб
-
оптимальный регулятор
.
Построение таким способом
H
∞
-
регулятора
трудо
e
мко потому
,
что необходимо решать два уравнения Риккати в ка
-
ждом цикле выбора параметра
γ
,
а при построении
H
2
-
регулятора урав
-
нения решаются только один раз
.
Существует способ решения
,
при котором нет необходимости нахо
-
дить
γ
итерационным путем
.
Основываясь на методике
,
предложенной
в работе
[9],
можно определить
γ
опт
и
,
таким образом
,
построить регу
-
лятор со значением
γ
=
γ
опт
,
не прибегая к итерационной процедуре
,
при этом повышается быстродействие синтеза
.
Траектория КТС с таким
H
∞
-
регулятором отличается незначитель
-
но от траекторий КТС с
H
2
-
регулятором в силу малости интервала вре
-
мени
L
и большой скорости сходимости итерационной процедуры
.
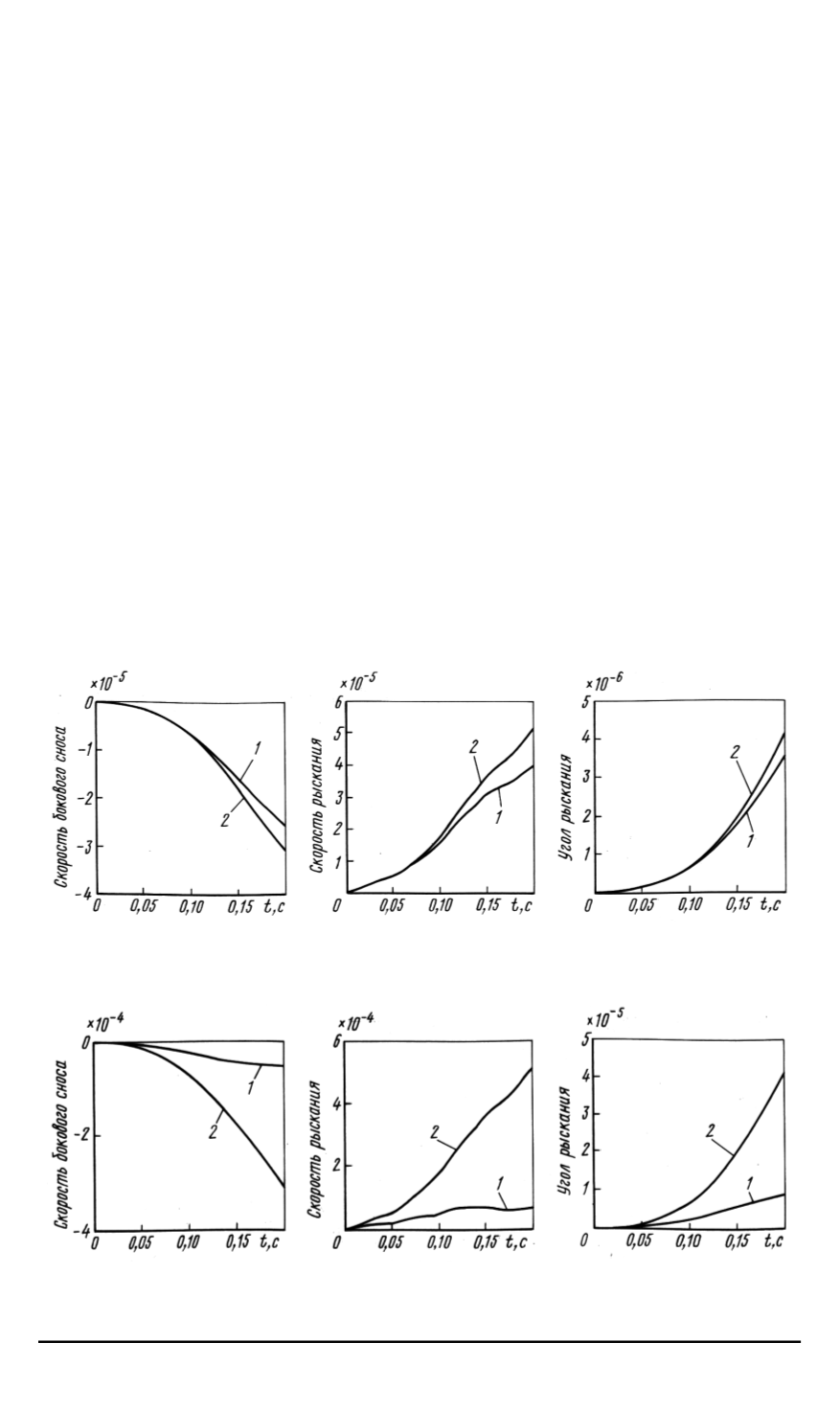
Результаты моделирования
.
Результаты моделирования движения
объекта представлены на рис
. 7, 8;
из них следует
,
что регулятор позво
-
ляет уменьшить скорость
“
закрутки
”
и скорость бокового
“
сноса
”
КТС
.
Рис
. 7.
Результаты моделирования движения системы при
K
т
ij
= 50
:
1
—
с регулятором
;
2
—
без регулятора
Рис
. 8.
Результаты моделирования движения системы при
K
т
ij
= 500
:
1
—
с регулятором
;
2
—
без регулятора
ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Приборостроение
". 2004.
№
4 55


