Рис
. 1.
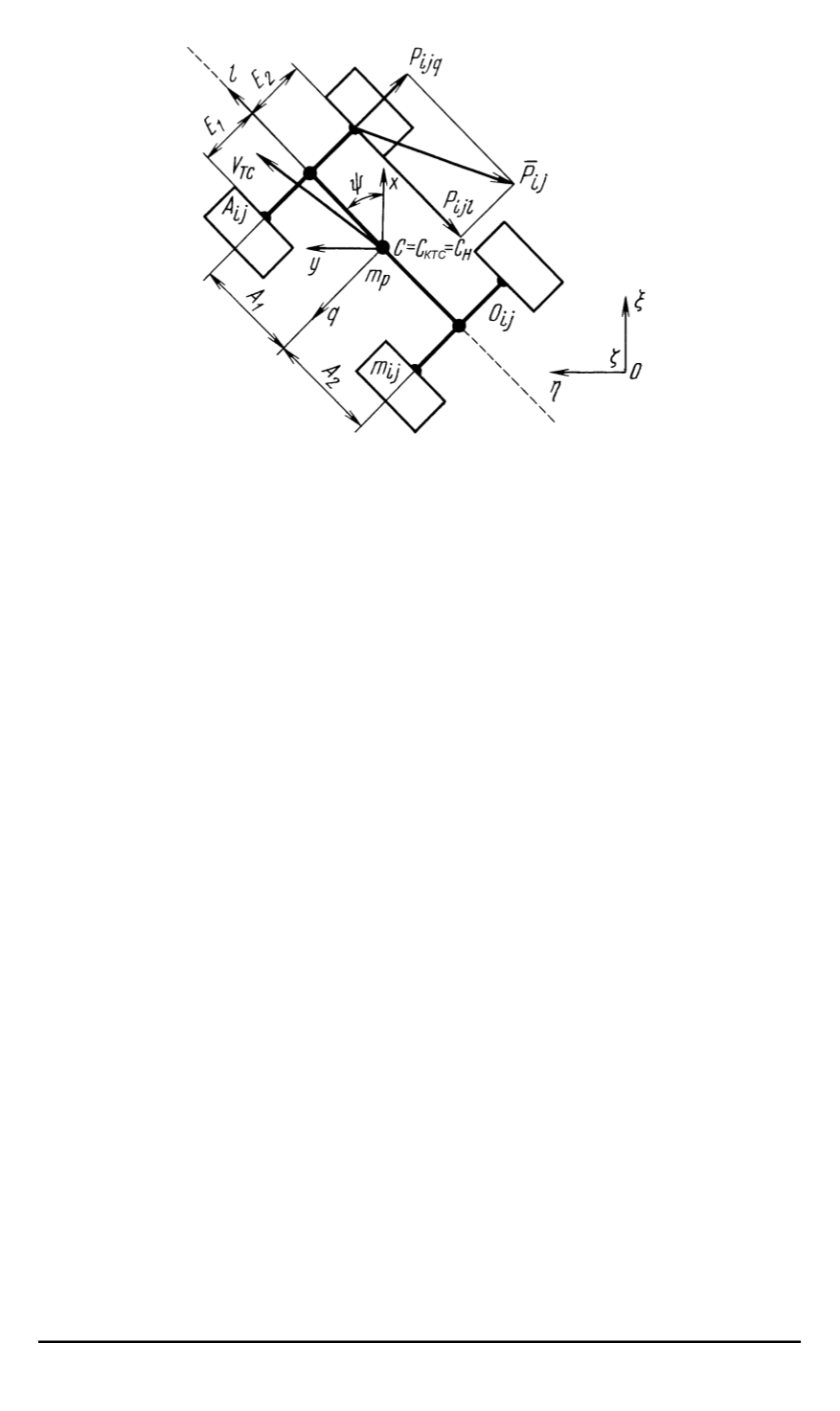
Упрощенная расчетная схема КТС
(
вид сверху с положительного напра
-
вления оси
z
,
проходящей через точку
C
КТС
):
индекс
i
задает переднюю
(
i
= 1)
и заднюю
(
i
= 2)
оси
,
а индекс
j
—
левую
(
j
= 1)
и правую
(
j
= 2)
стороны по ходу движения КТС
;
A
1
и
A
2
—
расстояния от перед
-
ней и задней осей соответственно до центра масс
;
E
1
и
E
2
—
расстояния от левого и
правого колес соответственно до центра масс
вертикальна
,
а ось
О
ξ
направлена по ходу движения
,
вдоль проекции
начального вектора скорости центра масс КТС
V
C
0
на опорную плос
-
кость
.
Точка
С
—
проекция
C
КТС
на плоскость
,
проходящую через оси
кол
e
с
.
В начальный момент времени точка
C
≡
C
0
в системе
О
ξηζ
имеет координаты
(0
,
0
, R
)
,
где
R
—
радиус колеса
.
Пусть также
C
0
xyz
—
рабочая неподвижная система отсч
e
та
;
в
начальный момент времени
C
0
xyz
полностью совпадает с
О
ξηζ
,
за
исключением координаты
z
=
ζ
−
R
;
Clqz
—
система отсчета
,
жест
-
ко связанная с КТС
.
Оси совпадают с главными центральными осями
инерции
,
причем ось
Cl
лежит в продольной плоскости симметрии
подрессоренной части КТС
.
Угловое положение
Clqz
относительно
C
0
xyz
определяется углами Эйлера
(
ψ, ϑ, γ
)
.
Угол рыскания
ψ
—
угол
поворота подрессоренной части КТС вокруг оси
Cz
,
угол тангажа
ϑ
—
угол поворота вокруг
Cq
(
поперечной оси
),
угол крена
γ
—
угол пово
-
рота вокруг
Cl
(
продольной оси
).
Необходимо достигнуть улучшения
характеристик движения КТС только путем формирования дополни
-
тельных воздействий в стандартной АБС
.
Поэтому влияние рулевого
управления не учитывается
.
Допущения
.
Обозначим массу каждого колеса и его радиус в нена
-
груженном состоянии
m
н
ij
и
R
;
центры масс КТС и его неподрессорен
-
ной части обозначим точками
C
КТС
и
C
н
соответственно
.
Центры масс
кол
e
с расположены в точках
A
ij
на осях вращения колес
;
здесь индекс
ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. "
Приборостроение
". 2004.
№
4 45


