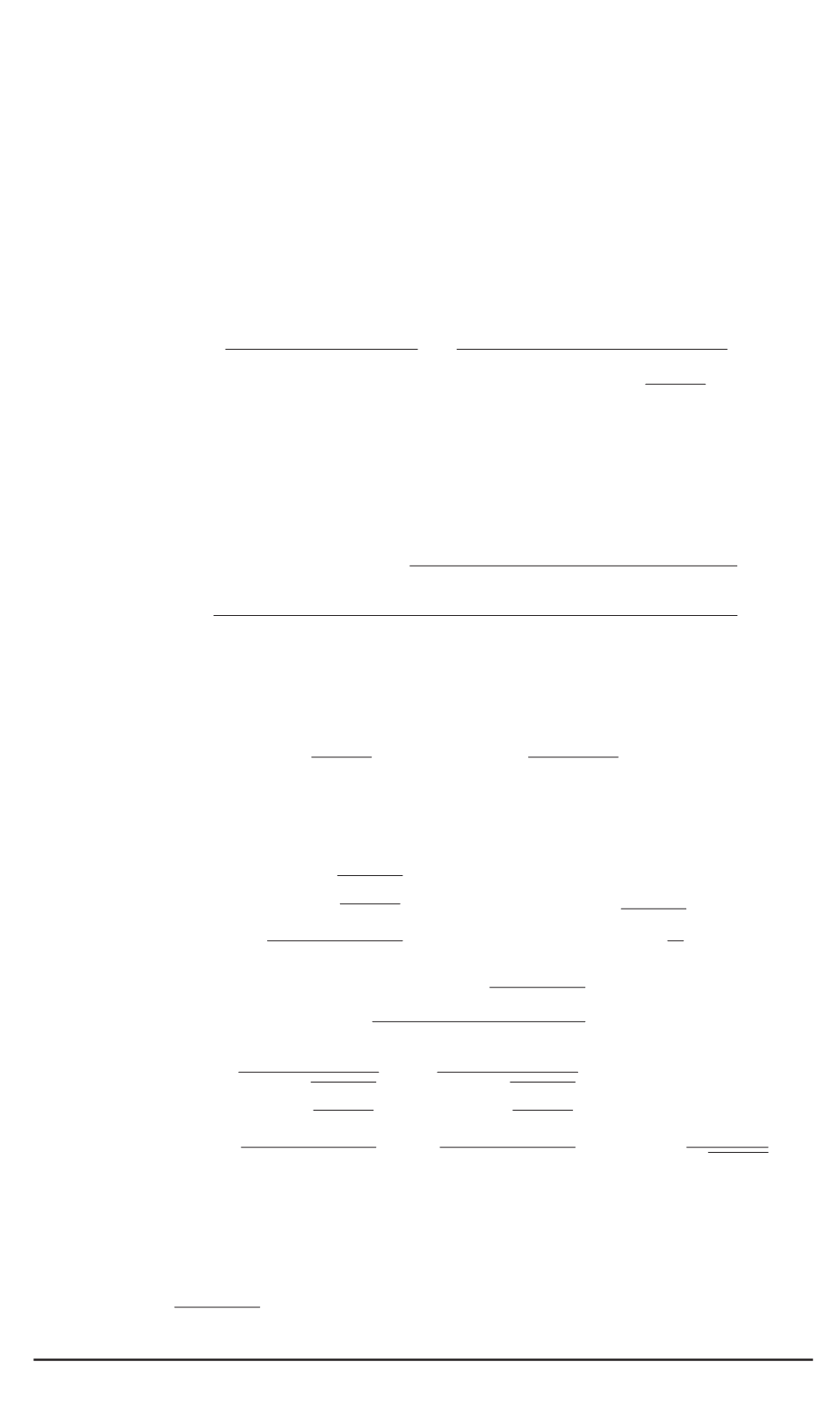
обозначено
1
— объектдемпфирования ГС;
2
— инерционная масса,
связанная с объектом электрической пружиной, включающей датчик
угла
3
, усилитель
4
, датчик момента
5
и управляющее устройство
6
,
обеспечивающее логический закон управления жесткостью.
Динамический гаситель отключить можно не только путем “обры-
ва” упругой связи (
C
2
→
0)
, но и “заклинивания” (
C
2
→ ∞
)
массы
гасителя относительно демпфируемой массы. При этом масса гасителя
жестко соединяется с объектом демпфирования, передаточная функ-
ция которого будет иметь вид
W
∞
11
(
p
) =
1
(
A
1
+
A
2
)
p
2
+
C
1
=
1
A
1
(1 +
χ
)
p
2
+
ν
2
1
1 +
χ
.
Передаточные функции податливости замкнутой системы опреде-
ляются теми же выражениями (4), что и в случае обрыва упругой
связи. Инвариантные частоты при заклинивании массы гасителя опре-
деляются формулой
Ω
∞
1
,
2
2
=
ν
2
1
1 +
f
(1 +
χ
)
∓
[1 +
f
(1 +
χ
)]
2
−
4
f
(1 +
χ/
2)
2 +
χ
.
Оптимальная настройка гасителя определяется равенством амплитуд
в инвариантных точках:
ν
∞
2
=
ν
1
1
1 +
χ
,
или
f
∞
=
1
(1 +
χ
)
2
.
Оптимальной настройке соответствуют следующие значения пара-
метров ГС:
Ω
∞
1
,
2
2
=
ν
2
1
1
∓
χ
2 +
χ
1 +
χ
;
N
∞
1
=
N
∞
2
= 1 +
2
χ
;
ω
∞
01
,
2
2
=
ν
2
1
2 +
χ
∓
χ
(4 +
χ
)
2(1 +
χ
)
;
ΔΩ
∞
=
ν
1
⎛
⎜⎜⎜⎜⎝
1 +
χ
2 +
χ
1 +
χ
−
1
−
χ
2 +
χ
1 +
χ
⎞
⎟⎟⎟⎟⎠
= ΔΩ
∗
1
√
1 +
χ
,
где
ΔΩ
∗
— полоса гашения в случае обрыва упругой связи (
C
2
= 0)
.
Амплитуда в инвариантных точках оказывается одинаковой
N
∞
1
,
2
=
=
N
∗
1
,
2
= 1 + 2
/χ
. Поскольку эффективность обоих способов “от-
118 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 4


