опубликовал специалист “НПО машиностроения” А.Ф. Фролов [5, 6],
успешно защитивший по этой теме диссертацию. Несколько позже
другой специалист “НПО машиностроения” Н.В. Баранов по близкой
тематике защитил диссертацию на кафедре “Системы автоматического
управления” (ИУ-1) МВТУ им. Н.Э. Бумана.
Этот, далеко не полный, исторический экскурс предпринят с целью
предостеречь от поверхностных подходов к этой проблеме. Несмотря
на достаточно большое число работ, посвященных данной тематике,
остались открытые вопросы.
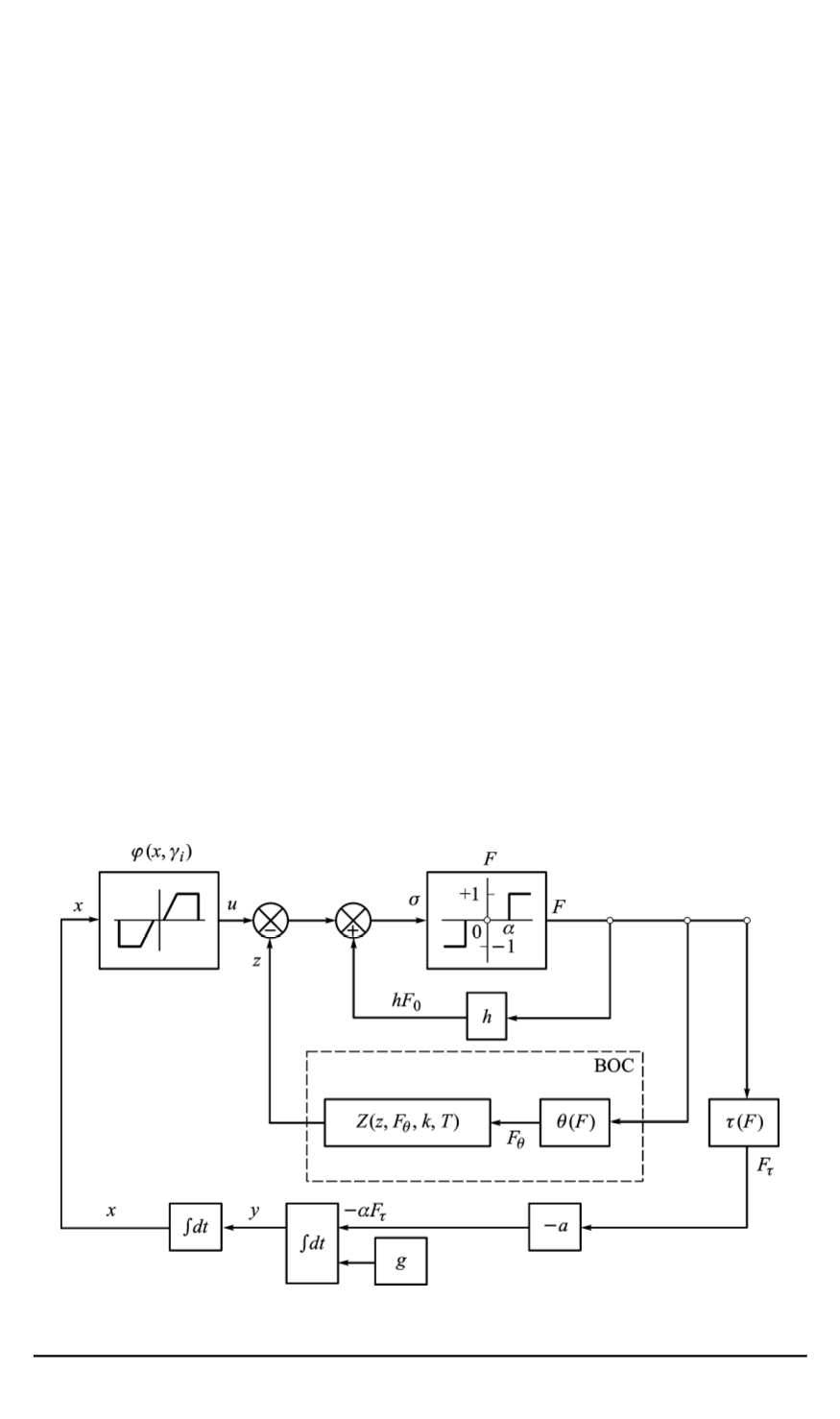
Математическая модель
. Рассмотрим одномерное угловое движе-
ние КА вокруг одной из связанных осей координат. Соответствующая
схема системы стабилизации приведена на рис. 1.
Математическая модель рассматриваемой системы описывается
системой дифференциальных уравнений третьего порядка с добавле-
нием соотношений для нелинейных элементов:
dx/dt
=
y, dy/dt
=
g
−
aF
τ
;
(1)
F
=
F
(
σ, α
) = 0
,
5 [sign (
σ
−
α
) + sign (
σ
+
α
)] ;
(2)
F
τ
(
t
) =
F
(
t
−
τ
)
, τ
=
τ
(
F
)
2 {
τ
1
, τ
2
}
;
(3)
σ
=
u
−
z
+
hF
0
, u
=
ϕ
(
x, γ
i
)
, i
= 1
,
2
,
3;
(4)
dz/dt
=
−
(1
/T
)
z
+ (
k/T
)
F
θ
;
(5)
F
θ
(
t
) =
F
(
t
−
θ
)
, θ
=
θ
(
F
)
2 {
θ
1
, θ
2
}
;
(6)
T
=
T
(
F
θ
)
2 {
T
1
, T
2
}
.
(7)
Рис. 1. Схема системы стабилизации КА с внутренней обратной связью (ВОС)
116 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 2


