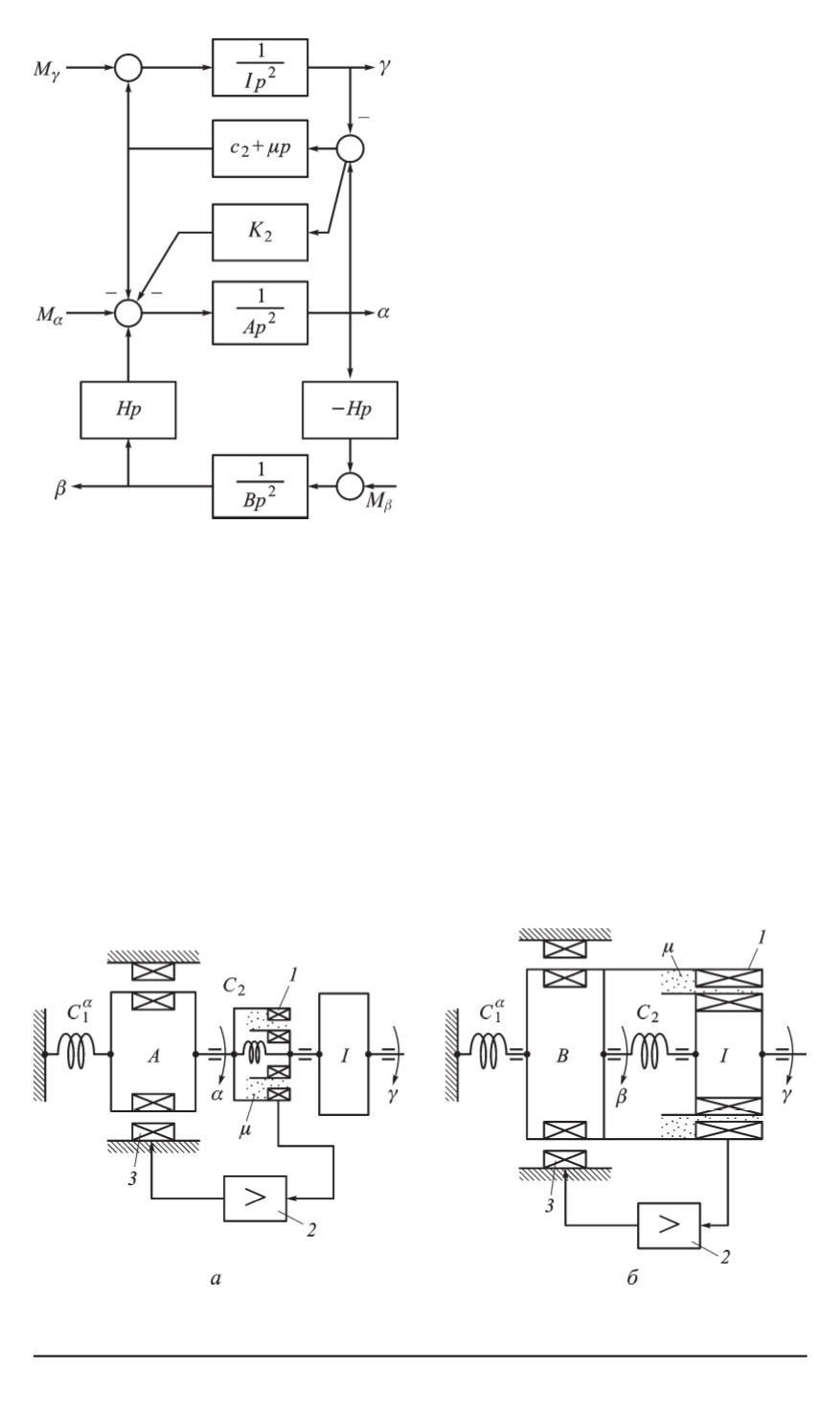
Рис. 2. Структурная схема ГС, соот-
ветствующая уравнениям (1)
Здесь
А
,
В
и
α, β
— приведен-
ные моменты инерции и углы по-
ворота ГС относительно наружной
и внутренней осей соответственно;
I, γ
— момент инерции и угол пово-
рота маховика (инерционной мас-
сы) демпфера относительно оси,
на которой он установлен;
Н
—
кинетический момент гироскопа;
C
2
и
μ
— коэффициенты упругой и
диссипативной связи ГС с инерци-
онной массой;
K
2
и
h
— коэффици-
енты активной обратной связи по
углу и угловой скорости закручива-
ния;
M
α
, M
β
, M
γ
— внешние мо-
менты относительно соответству-
ющих осей.
Структурная схема (см.
рис. 1,
а
), соответствующая уравнениям (1), приведена на рис. 2.
Исключая из уравнений (1) координату
β
, а из уравнений (2) —
координату
α
, получаем уравнения механических аналогов динамиче-
ских свойств гиросистем относительно осей, на которых установлен
демпфер. Динамические модели механических аналогов ГС показаны
на рис. 3.
Вначале рассмотрим случай, когда демпфер установлен на оси на-
ружной рамки (для гиростабилизатора — на оси стабилизации).
Запишем уравнения (1) в векторно-матричной форме:
Рис. 3. Механические аналоги динамических свойств ГС:
а
и
б
— см. соответственно рис. 1,
а
и
б
40 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 4


