














 13 / 17
13 / 17

А.В. Жирнов, С.Н. Тимаков
110
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 4
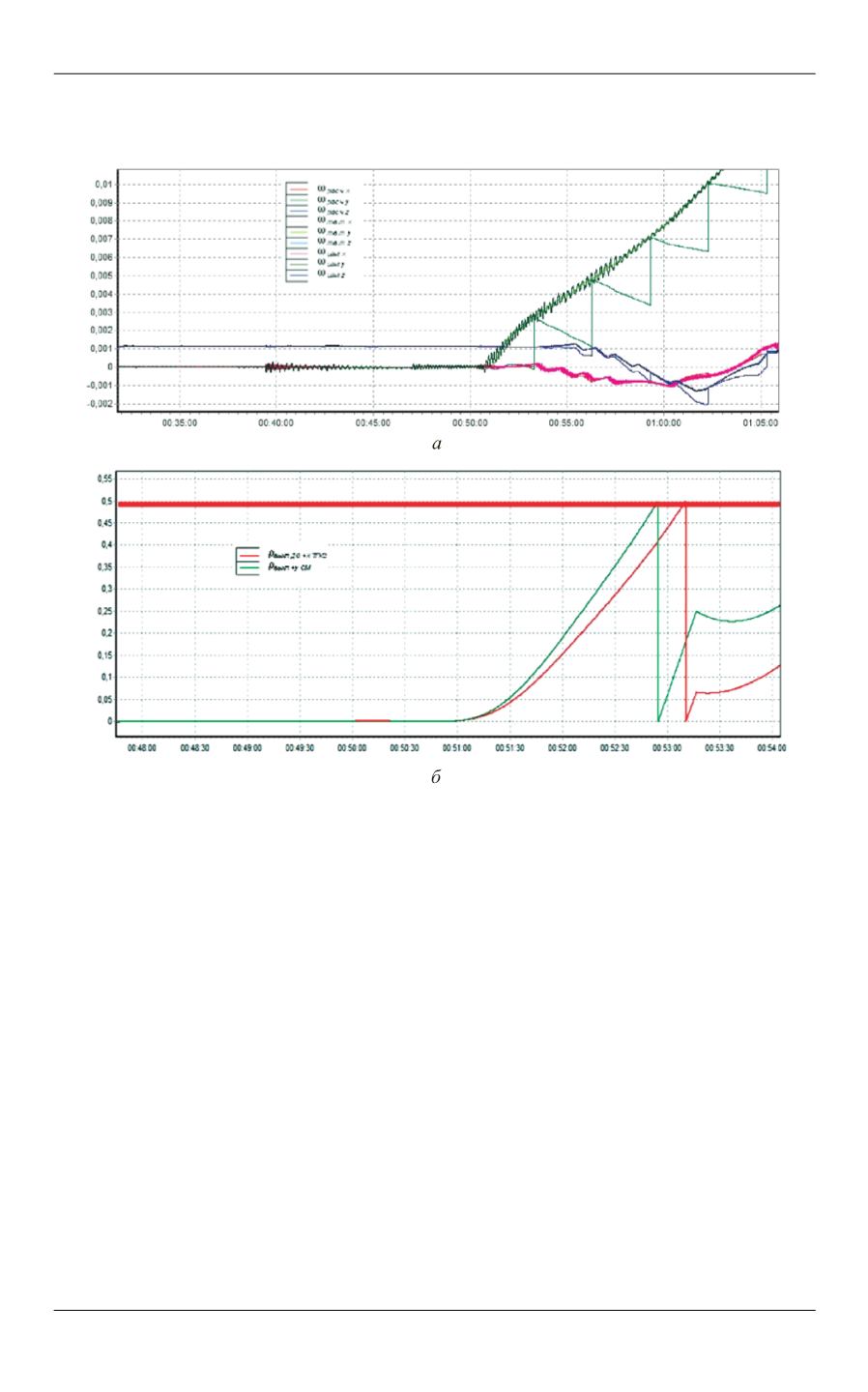
На рис. 6 показана реакция системы на отказ
невыключение
двигателя слу-
жебного модуля, который используется для управления по каналу рысканья.
Рис. 6.
Результаты моделирования отказа
невыключение
двигателя служебного модуля
для управления по + рысканью
В этом примере наоборот, невязка ρ
выкл +
y
СМ,
соответствующая двигателю СМ
для управления по каналу + рысканье, быстрее, чем невязка ρ
выкл ДО +
x
ТГК2
, соответ-
ствующая двигателю корабля «Прогресс» для управления по каналу + крен, достиг-
ла порога, а следовательно, предложенный авторами алгоритм в обоих случаях
верно определил и распознал отказавшие двигатели.
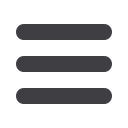
На рис. 7 приведена телеметрическая информация, переданная с борта МКС
во время летного теста, описанного в настоящей статье алгоритма. Тест состоял
в проведении программных разворотов станции.
На рис. 7,
а
показано поведение вектора измеренной угловой скорости. Как
следует из графиков в измерениях присутствуют довольно высокие составляю-
щие, вызванные влиянием упругих колебаний конструкции. Несмотря на это,
алгоритм не выдал ложных сообщений об отказе ДО. На рис. 7,
б
показано по-
ведение векторов оценки угловой скорости аппарата как абсолютно твердого
тела, формируемой в реальном времени адаптивным наблюдателем, и угловой
скорости, рассчитываемой в алгоритме диагностики отказов по формуле (9).