














 11 / 17
11 / 17

А.В. Жирнов, С.Н. Тимаков
108
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 4
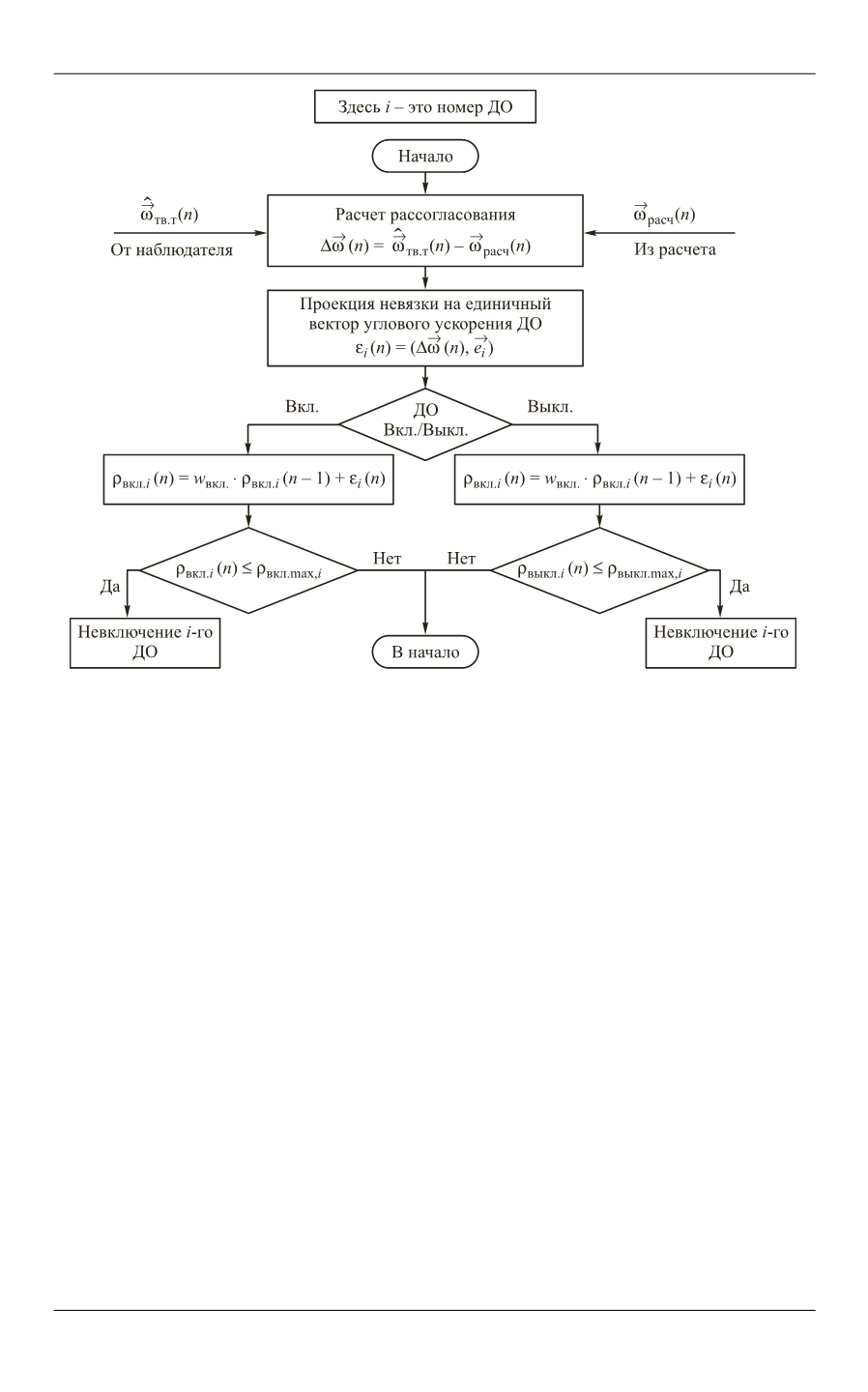
Рис. 4.
Схема алгоритма диагностики отказов ДО
ральной невязки
выкл.
выкл выкл.
( )
( 1) ( ),
i
i
i
n w
n
n
а в моменты его активно-
сти — накапливается интегральная невязка
вкл.
вкл вкл.
( )
( 1) ( ).
i
i
i
n w
n
n
Таким образом, когда отказ
i
-го ДО отсутствует, соответствующая этому ДО
проекция вектора рассогласования
( )
i
n
будет мала, и за счет весовых коэф-
фициентов
w
выкл
< 1 и
w
вкл
< 1 интегральные невязки ρ
выкл.
i
(
n
) и ρ
вкл.
i
(
n
) будут
уменьшаться с каждым тактом. В случае же возникновения отказа
невыклю-
чение
или
невключение
ДО проекция вектора рассогласования будет достаточно
велика, и соответствующая интегральная невязка ρ
выкл.
i
(
n
) или ρ
вкл.
i
(
n
) будет
расти, а при достижении ими заранее заданного порога ρ
выкл. max
i
(
n
) или
ρ
вкл. max
i
(
n
) соответственно будет выдано сообщение об отказе ДО.
Такая схема диагностики отказов позволяет распознавать, не путая друг с
другом, отказы двигателей, направления угловых ускорений от которых не сов-
падают с направлениями осей каналов управления (крена, рысканья и тангажа),
а также избежать ложной диагностики отказов из-за влияния упругих колеба-
ний конструкции.
Результаты моделирования и летного теста алгоритма диагностики от-
казов ДО.
На рис. 5 показаны реакция системы на отказ
невыключение
двигате-
ля корабля «Прогресс» (пристыкованного к надирному узлу станции), который
используется для управления по каналу крена. На рис. 5,
а
показаны значения