














 9 / 12
9 / 12

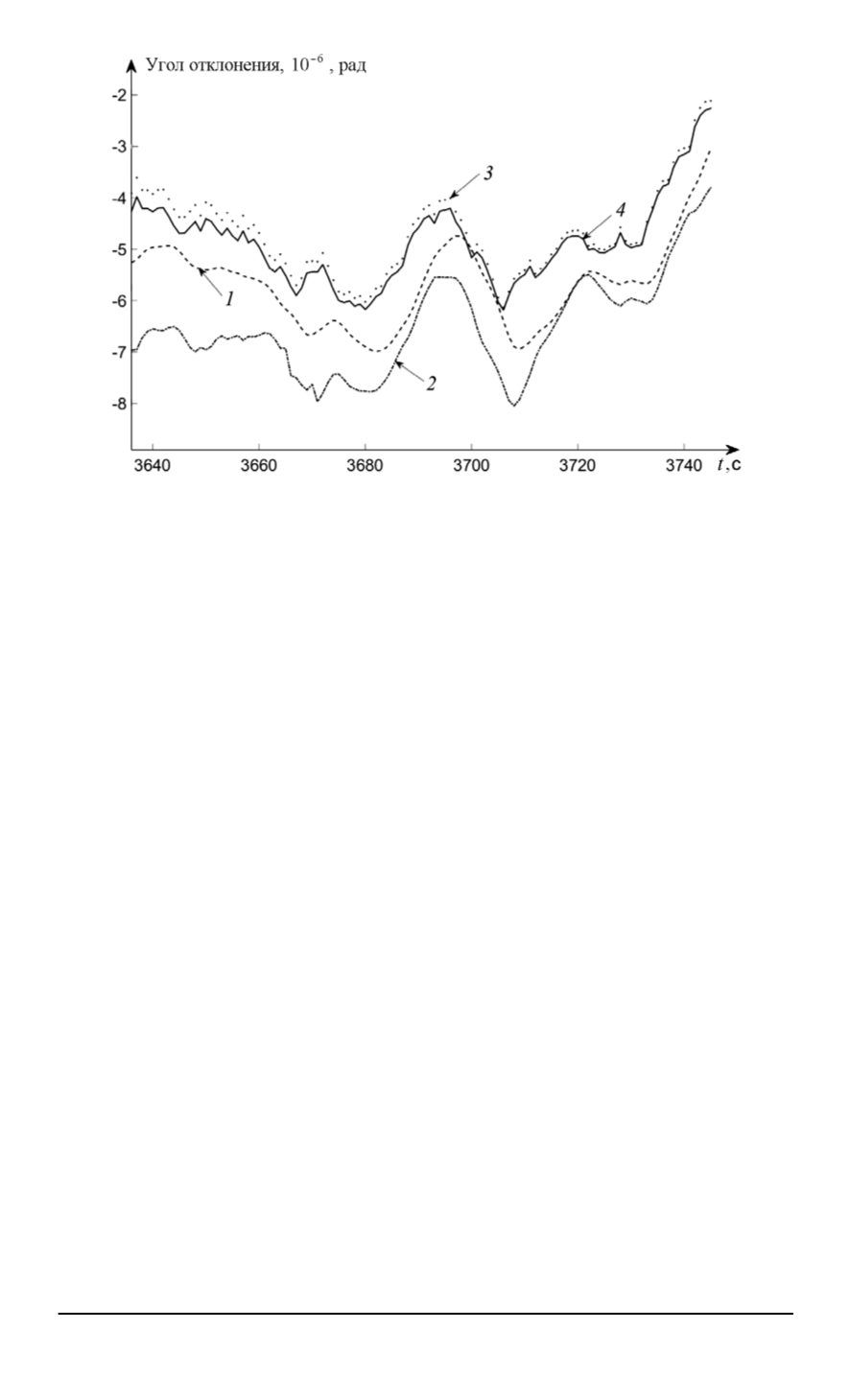
Рис. 6. Оценивание составляющих восточных углов отклонения ИНС:
1
— нелинейный фильтр Калмана;
2
— линейная адаптивная модификация фильтра
Калмана;
3
— нелинейный фильтр Калмана, модифицированный с помощью генети-
ческого алгоритма;
4
— ошибки навигационной системы Ц-060К
Моделирование по данным лабораторных экспериментов.
Для
того чтобы оценить эффективность алгоритмов коррекции были ис-
пользованы данные лабораторных экспериментов с реальными серий-
ными навигационными системами АИСТ-350, КомпаНав-2 и Ц-060К.
В процессе проведения лабораторного эксперимента навигационная
система была установлена на неподвижном основании, поэтому ее
выходные сигналы являлись ошибками ИНС. Ошибки ИНС при опре-
делении скорости приняты в качестве измерений для алгоритма оцени-
вания. Результаты оценивания ошибок ИНС, например составляющие
восточные углы отклонения, с использованием данных эксперимента
системой Ц-060К показаны на рис. 6.
Результаты полунатурного моделирования продемонстрировали
преимущество НФК с ГА, который работает гораздо лучше, чем клас-
сический НФК. Ошибки оценивания линейной адаптивной модифи-
кации фильтра Калмана несколько больше ошибок оценивания НФК,
что объясняется удачным выбором нелинейной модели погрешностей
ИНС. В условиях реальной эксплуатации ЛА выбрать априорную аде-
кватную нелинейную модель погрешностей ИНС не представляется
возможным, поэтому целесообразно использовать линейные адаптив-
ные модификации фильтра Калмана или НФК с ГА.
Заключение.
Исследованы способы коррекции навигационной
информации ЛА. Представлены различные схемы коррекции нави-
гационных систем и комплексов, а также соответствующие алгорит-
мы обработки информации. Рассмотрены алгоритмы коррекции авто-
36 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 2