














 7 / 12
7 / 12

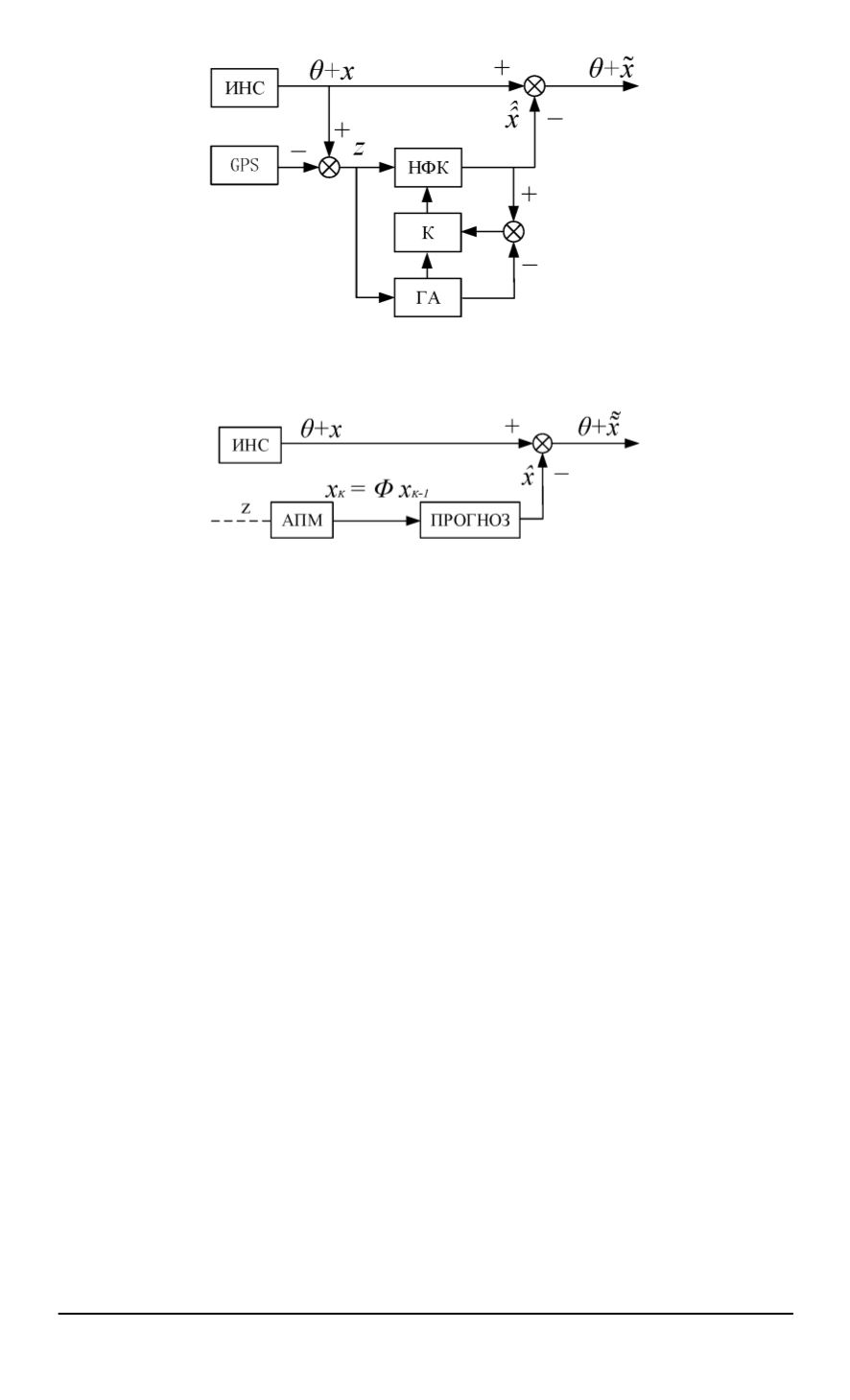
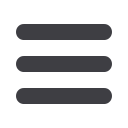
Рис. 3. Схема коррекции ИНС с использованием генетического алгоритма:
К — индикатор расходимости процесса оценивания;
ˆˆ
x
— прогноз вектора
x
Рис. 4. Схема коррекции ИНС с использованием эволюционного алгоритма:
АПМ — алгоритм построения модели;
˜
x
— вектор ошибок прогнозирования
Навигационные комплексы (НК), реализующие селективный под-
ход, состоят из максимально возможного числа систем и датчиков
навигационной информации, а также алгоритмического обеспечения.
Алгоритмическое обеспечение селективного навигационного комплек-
са включает в себя алгоритм выбора наиболее достоверной навигаци-
онной информации и алгоритм обработки этой информации в целях
повышения точности навигационного комплекса.
Увеличение числа измерительных систем теоретически позволяет с
большей точностью получить информацию о навигационных параме-
трах объекта. На практике же при использовании систем с различными
точностными характеристиками и из-за несовершенства алгоритмиче-
ского обеспечения точность определения навигационной информации
снижается. Поэтому с помощью алгоритмов комплексирования выде-
ляются системы, позволяющие получать наиболее достоверную ин-
формацию о навигационных параметрах объекта.
Селективные измерительные комплексы предполагают определе-
ние наиболее достоверной информации и последующую обработку ее
посредством алгоритма оценивания. С выхода алгоритма оценивания
оценка вектора состояния поступает в выходную информацию ком-
плекса для коррекции последней.
Для определения наиболее достоверной информации предлагается
использовать критерий степени наблюдаемости [5]. Состав навига-
ционного комплекса определяется по наибольшему значению крите-
34 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 2