














 8 / 12
8 / 12

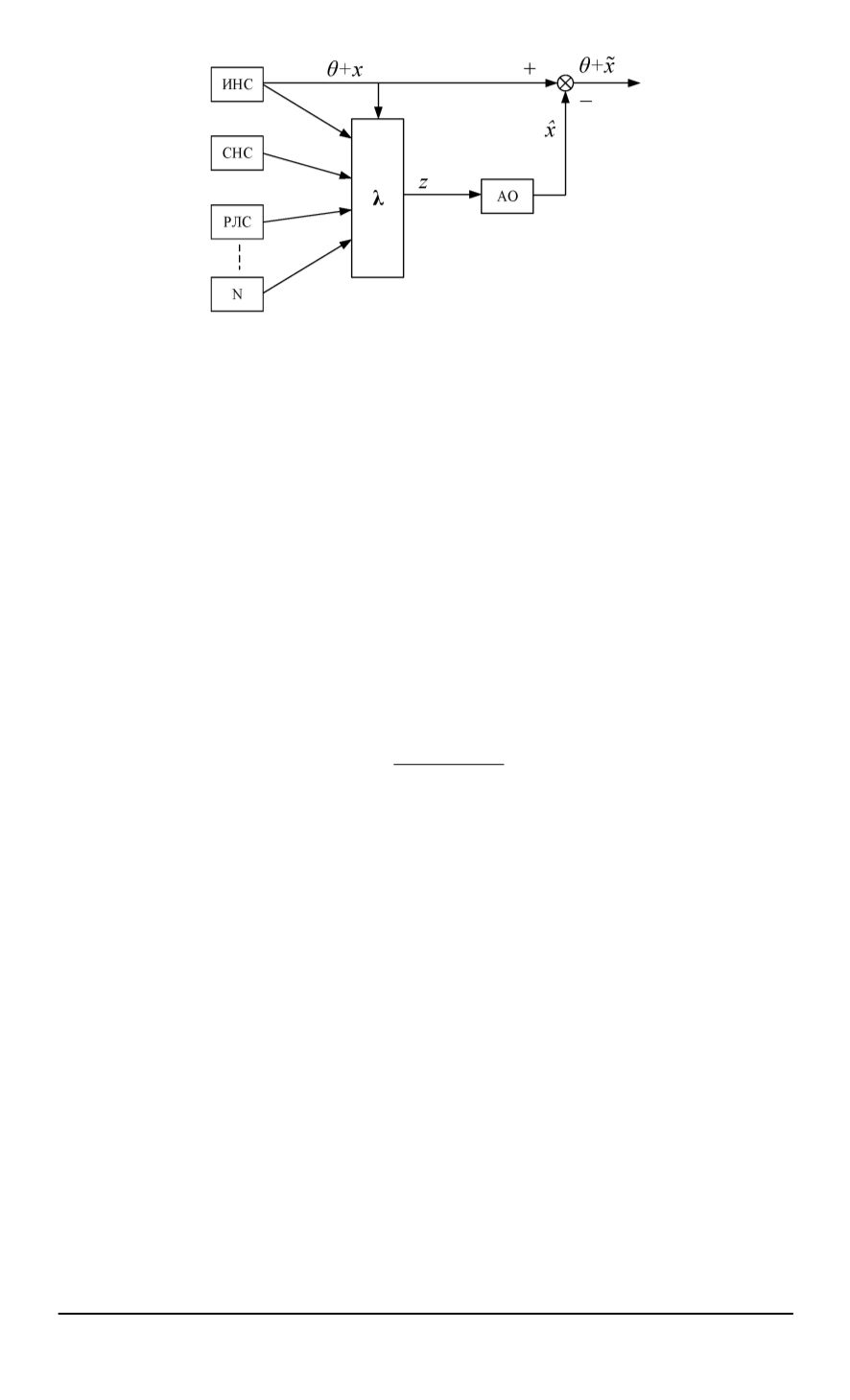
Рис. 5. Схема селективного измерительного комплекса:
λ
— блок определения степеней наблюдаемости и формирования измерений
рия степени наблюдаемости конкретной компоненты вектора состоя-
ния. При функционировании селективных навигационных комплексов
периодически проводится анализ степеней наблюдаемости перемен-
ных состояния и осуществляется автоматический выбор наилучшей
структуры комплекса. Измеряемые посредством выбранных датчиков
сигналы используются в алгоритме оценивания для формирования
оценок погрешностей базовой навигационной системы. Затем оцен-
ки погрешностей используются для коррекции навигационной инфор-
мации. Схема селективного навигационного комплекса представлена
на рис. 5.
Критерий степени наблюдаемости имеет вид [10]
λ
i
=
M[(
x
i
)
2
]
r
M[(
y
i
)
2
]
r
∗
i
,
(8)
где
M[(
x
i
)
2
]
— дисперсия произвольной
i
-й компоненты вектора со-
стояния;
M[(
y
i
)
2
]
— дисперсия непосредственно измеряемого вектора
состояния.
Дисперсия приведенного к
i
-й компоненте измерительного шума
определяется коэффициентами
a
1
, a
2
, . . . , a
n
[11], т.е.
r
∗
i
= M[(
v
∗
i
)
2
] = [
a
2
1
+
a
2
2
+
. . .
+
a
2
n
]
r,
(9)
где
a
1
, a
2
, . . . , a
n
— это
i
-я строка матрицы
S
−
1
;
S
— матрица наблюда-
емости;
r
= M[(
v
)
2
]
— дисперсия исходного измерительного шума
v
.
Периодическая проверка степеней наблюдаемости и возможное из-
менение структуры навигационного комплекса осуществляется при
изменении режима функционирования несущего динамического объ-
екта. Предусматривается проведение проверки и при работе навига-
ционного комплекса в неизменном режиме. Периодичность проверки
в этом случае определяется из практических соображений с учетом
информации о скорости накопления ошибок в используемых систе-
мах [12] и внешних условий функционирования объекта.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 2 35