














 12 / 15
12 / 15

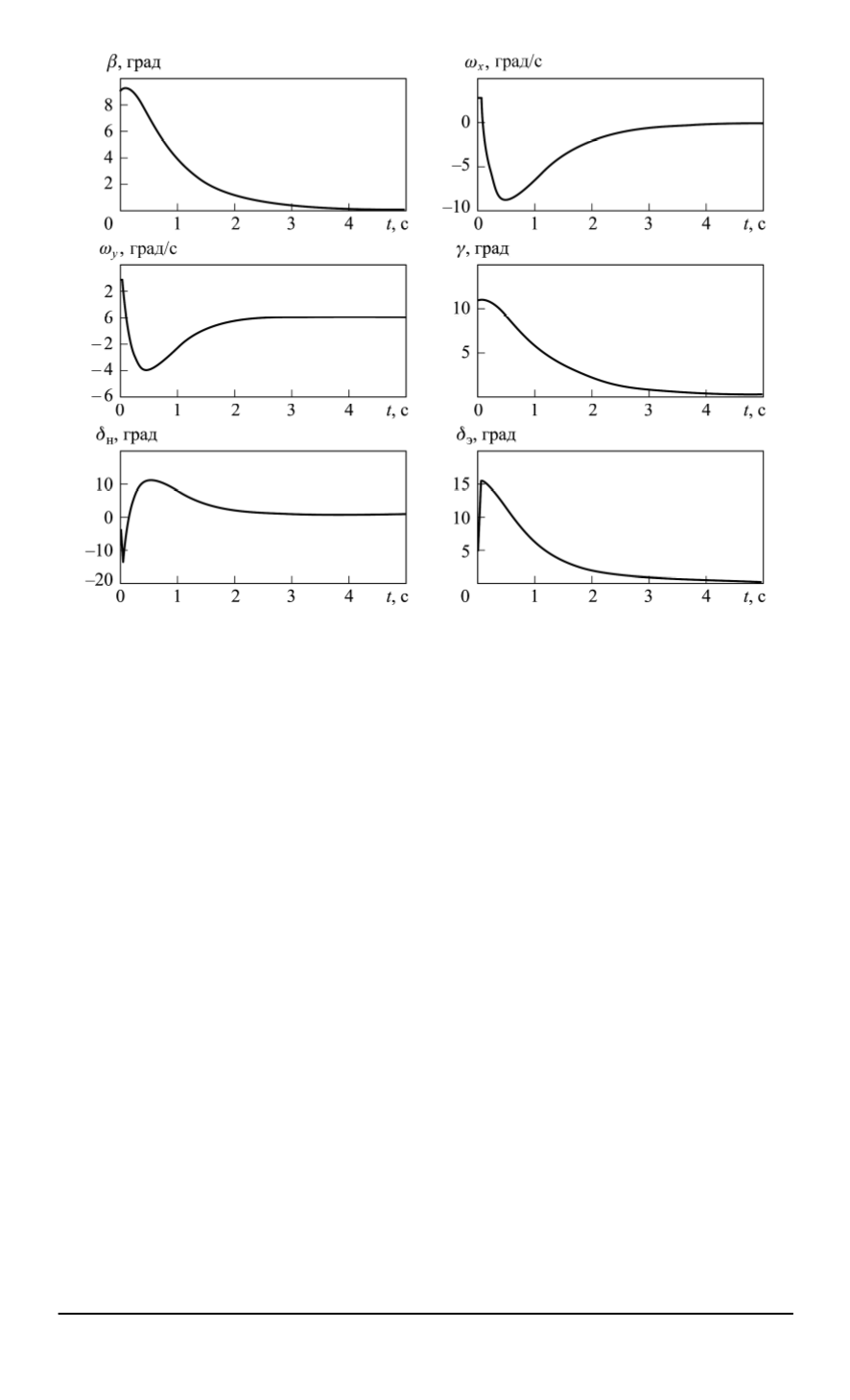
Рис. 1. Графики переходных процессов по компонентам вектора состояния и
затраты на управление для непараметризованного закона управления
рис. 1 и 2 приведены графики переходных процессов по компонентам
вектора состояния и затраты на управление. Видно, что для параме-
тризованного закона управления, обеспечивающего минимум суммы
всех элементов, взятых по модулю матрицы коэффициентов обратной
связи
K
p
, затраты на управление существенно меньше, чем для не-
параметризованного закона. При этом время переходного процесса в
первом и во втором случаях приблизительно одинаково.
Заключение.
Для линеаризованной модели бокового движения
летательного аппарата получены аналитические выражения законов
управления и построена полная их параметризация. В основу синте-
за положена оригинальная декомпозиция объекта управления и метод
модального управления МИМО-системой. Приведены результаты мо-
делирования управления боковым движением летательного аппарата с
использованием аналитически синтезированных обычного и параме-
тризованного законов управления, обеспечивающих минимум нормы
матрицы коэффициентов обратной связи. Показаны преимущества в
затратах на управление для параметризованного закона управления,
обеспечивающих минимум суммы всех элементов, взятых по модулю
матрицы коэффициентов обратной связи. Соответственно, как сами
законы управления, так и их параметризацию для бокового движе-
ния ЛА можно получить как с использованием обобщенной формулы
14 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2016. № 2