














 14 / 16
14 / 16

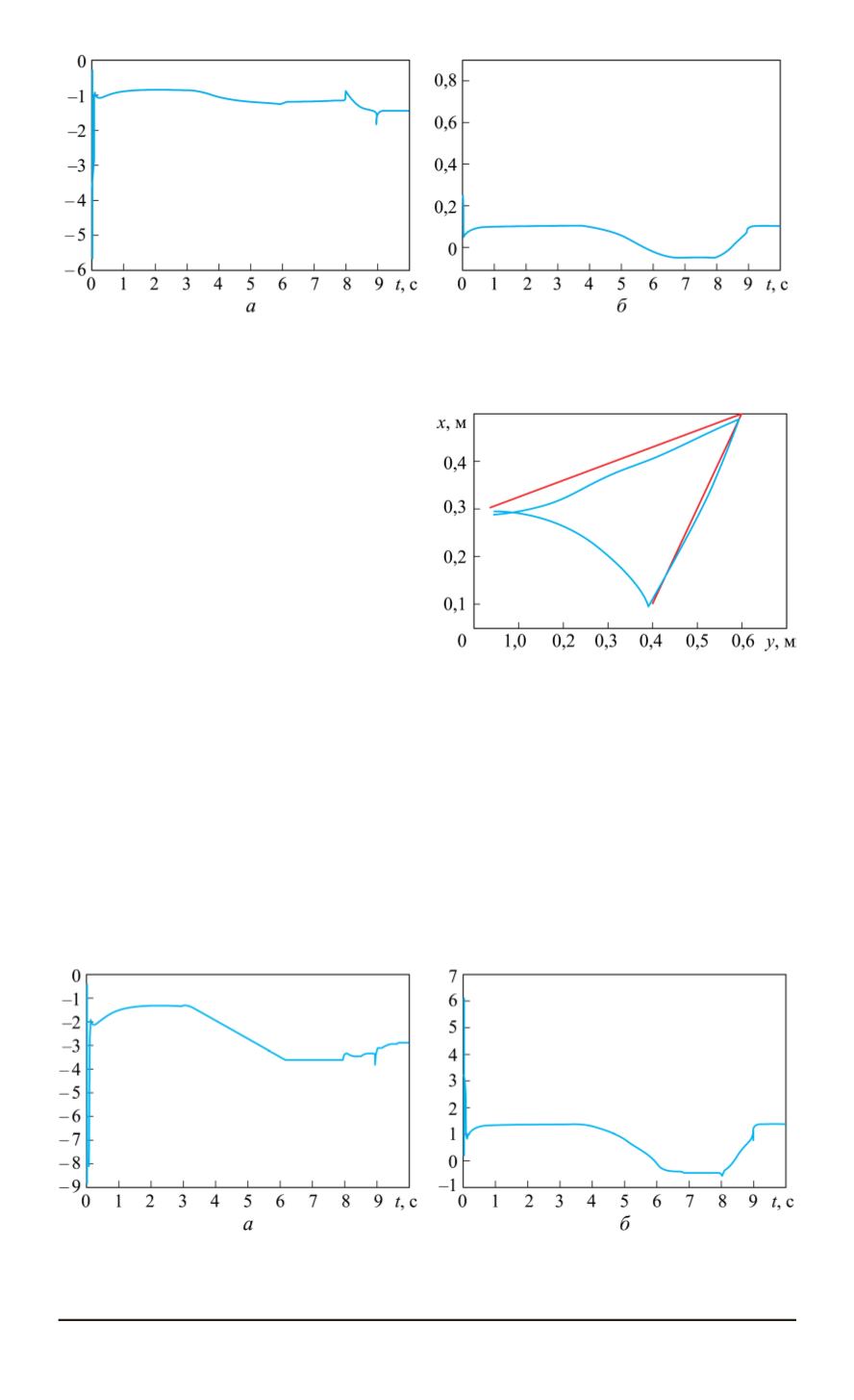
Рис. 7. Управляющий сигнал для первого (
а
) и второго (
б
) приводов
Рис. 8. Результаты моделирования на
плоскости
XY
с полезной нагрузкой
Для того чтобы исследовать
влияние изменения нагрузки на
процесс управления, было прове-
дено моделирование при тех же
условиях, но с полезной нагруз-
кой 500 г. Результаты моделирова-
ния на плоскости
XY
и сигналы
управления показаны на рис. 8, 9.
Отметим, что система практиче-
ски инвариантна к изменению по-
лезной нагрузки. Благодаря ис-
пользованию нечеткой логики при
реализации скользящих режимов
отсутствуют колебательные процессы в окрестности поверхности
скольжения (“дребезг” реле).
Заключение.
Предложенный алгоритм управления манипуля-
тором AFSM может быть реализован в качестве нелинейного кон-
троллера и позволяет решить две проблемы, которые возникают при
управлении нелинейными системами. Во-первых, теперь можно упра-
влять объектом с неполностью известной математической моделью.
Рис. 9. Управляющий сигнал для первого (
а
) и второго (
б
) приводов при нали-
чии полезной нагрузки
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 6 43