














 13 / 16
13 / 16

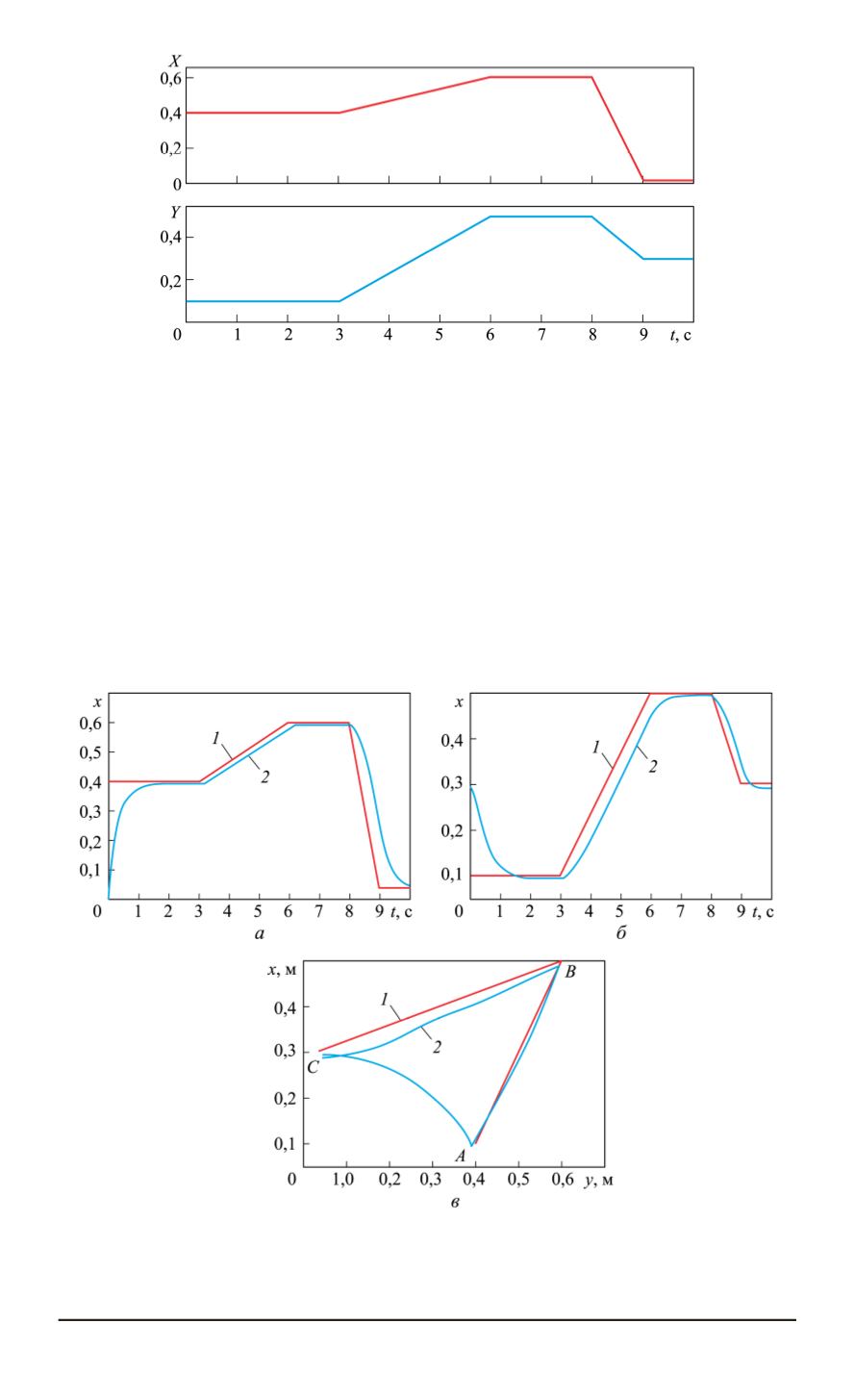
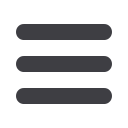
Рис. 5. Входные сигналы относительно осей
X
и
Y
Решая обратную кинематическую задачу, получают желаемые за-
коны изменения относительных углов поворота
θ
1
и
θ
2
. При использо-
вании алгоритма управления AFSM требуется найти реальные законы
изменения этих углов и сравнить их с желаемыми. Результаты моде-
лирования приведены на рис. 6. На рис. 7 показано изменение упра-
вляющих сигналов для первого и второго каналов управления.
Результаты моделирования показывают, что система управления
достаточно точно отрабатывает заданную траекторию. Однако пока
мы не рассматривали влияние изменения нагрузки.
Рис. 6. Результаты моделирования движения по осям
X
(
а
) и
Y
(
б
), а также в
плоскости
XY
(
в
):
1
,
2
— желаемое и фактическое изменение координат
42 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 6