














 11 / 16
11 / 16

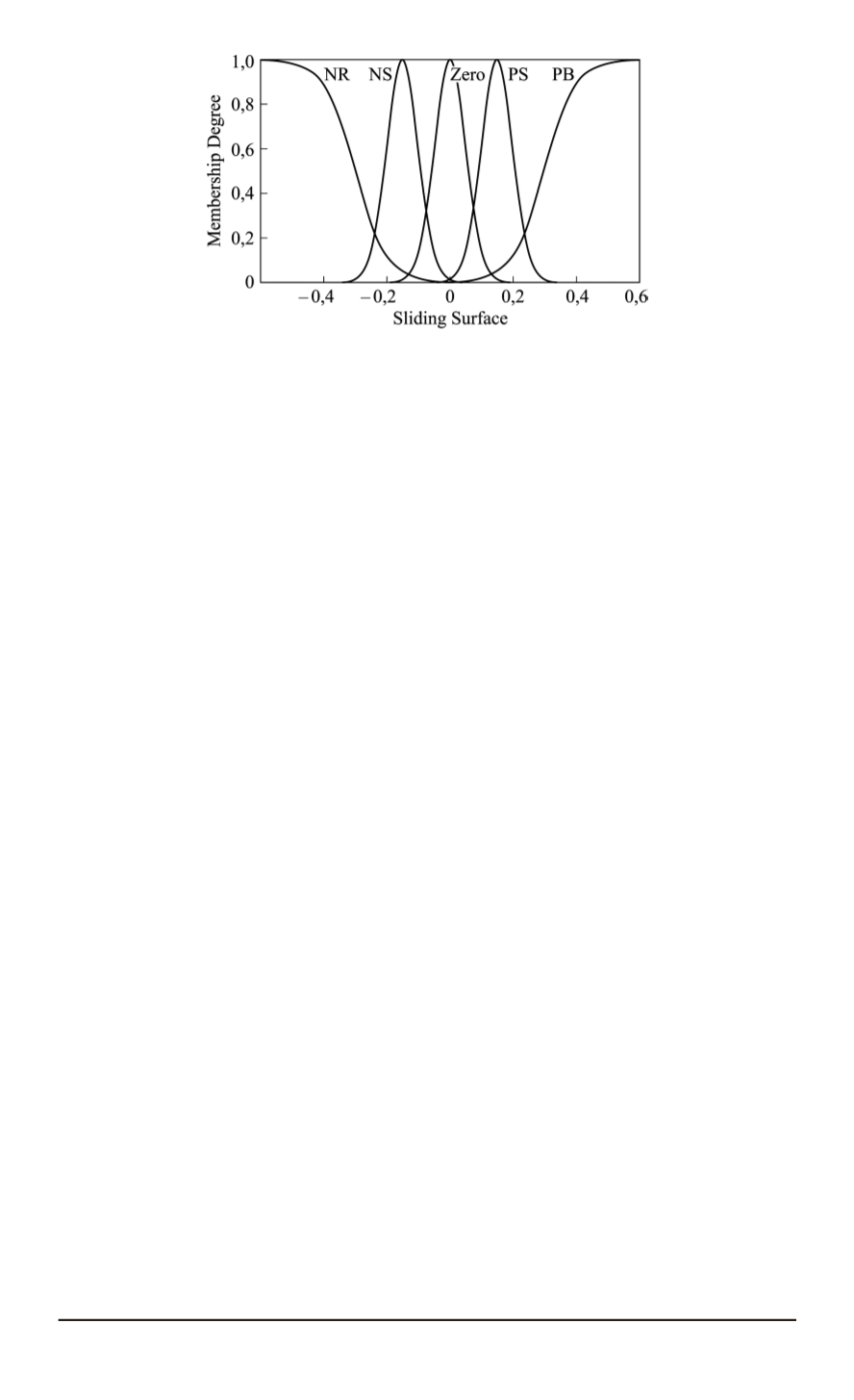
Рис. 3. Функции принадлежности для поверхности скольжения
движности. Для того чтобы получить удовлетворительные переход-
ные процессы в каждой степени подвижности можно воспользоваться
средствами пакета MATLAB Simulink. Получены следующие значения
параметров для 1-го и 2-го звеньев:
λ
11
= 0
,
0629
и 0,0640;
λ
21
= 0
,
0246
и 0,0224;
α
1
= 10000
и 1000;
α
2
=
−
3000
и
−
300
соответственно.
Поверхности скольжения получены с использованием выбранных
коэффициентов
λ
11
, λ
21
в соответствии с уравнением (5). Контрол-
лер вычисляет управление по формуле (24) с нечеткой составляющей
(23) и с использованием закона адаптации (28). Робастное управле-
ние формируется по формуле (29) с учетом настройки по формуле
(30). Выбранные функции принадлежности для входных переменных,
определяющих поверхности скольжения
S
= [
s
1
, s
2
]
T
, показаны на
рис. 3.
Начальные условия для функций принадлежности выходных коор-
динат:
b
i
(0) = [
−
0
,
5
,
−
0
,
25
,
0
,
0
,
25
,
0
,
5]
T
, i
= 1
,
2
.
Начальные условия для границ неопределенности следующие:
ψ
i
(0) = 0
,
1
, i
= 1
,
2
.
Результаты моделирования.
В этом разделе с использованием
пакета SIMULINK оцениваются возможности алгоритма AFSMC для
управления двухзвенным манипулятором. Для моделирования движе-
ния манипулятора использовались инструменты SimMechanics. Схема
моделирования приведена на рис. 4.
Размеры первого звена по связанным с ним осям
X
,
Y
и
Z
составля-
ют 0,03 м, 0,5 м и 0,03 м соответственно (средняя плотность 800 кг/м
3
);
то же для второго звена — 0,03 м, 0,25 м и 0,03 м соответственно (сред-
няя плотность 400 кг/м
3
).
В качестве входных сигналов при моделировании использовались
законы изменения желаемых координат
XY
конечной точки манипуля-
тора в диапазоне достижимости (рис. 5).
Эти сигналы соответствуют движению манипулятора по двум пря-
мым с одной общей точкой (рис. 6).
40 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 6