














 10 / 16
10 / 16

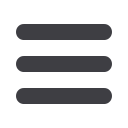
Рис. 2. Координаты конечной точки кинематической цепи манипулятора для
всех комбинаций углов
θ
1
и
θ
2
M
2
L
2
2
¨
θ
2
+
M
2
L
1
L
2
¨
θ
1
cos(
θ
1
−
θ
2
)
−
−
M
2
L
1
L
2
˙
θ
2
1
sin(
θ
1
−
θ
2
) +
M
2
gL
2
cos
θ
2
=
T
θ
2
.
(42)
Здесь
T
θ
1
,
T
θ
2
— управляющие моменты двигателей степеней подвиж-
ности манипулятора.
Для того чтобы найти решение, приведем систему к эквивалент-
ной системе дифференциальных уравнений первого порядка. Введем
новые переменные:
z
1
=
θ
1
, z
2
= ˙
θ
1
, z
3
=
θ
2
, z
4
= ˙
θ
2
.
(43)
Дифференцируя их по времени, получаем
˙
z
1
=
z
2
,
˙
z
2
= ¨
θ
1
,
˙
z
3
=
z
4
,
˙
z
4
= ¨
θ
2
;
(44)
˙
z
2
=
−
M
2
L
1
z
2
2
sin(
z
1
−
z
3
) cos(
z
1
−
z
3
) +
M
2
g
cos
z
3
cos(
z
1
−
z
3
)
−
−
M
2
L
2
z
2
4
sin(
z
1
−
z
3
)
−
(
M
1
+
M
2
)
g
cos
z
1
+
T
θ
1
L
1
+
T
θ
2
L
1
L
2
×
×
L
1
(
M
1
+
M
2
)
−
M
2
L
1
cos
2
(
z
1
−
z
3
)
−
1
;
(45)
˙
z
4
=
M
2
L
2
z
2
4
sin(
z
1
−
z
3
) cos(
z
1
−
z
3
)+(
M
1
+
M
2
)
g
cos
z
1
cos(
z
1
−
z
3
)+
+(
M
1
+
M
2
)
L
1
z
2
2
sin(
z
1
−
z
3
)
−
(
M
1
+
M
2
)
g
cos
z
3
−
T
θ
1
L
1
+
T
θ
2
M
2
L
2
×
×
L
2
(
M
1
+
M
2
)
−
M
2
L
2
cos
2
(
z
1
−
z
3
)
−
1
.
(46)
Поскольку система имеет две степени свободы, нужно определить
параметры
λ
11
, λ
21
, α
1
, α
2
, для каждого из контроллеров степеней по-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 6 39