














 10 / 12
10 / 12

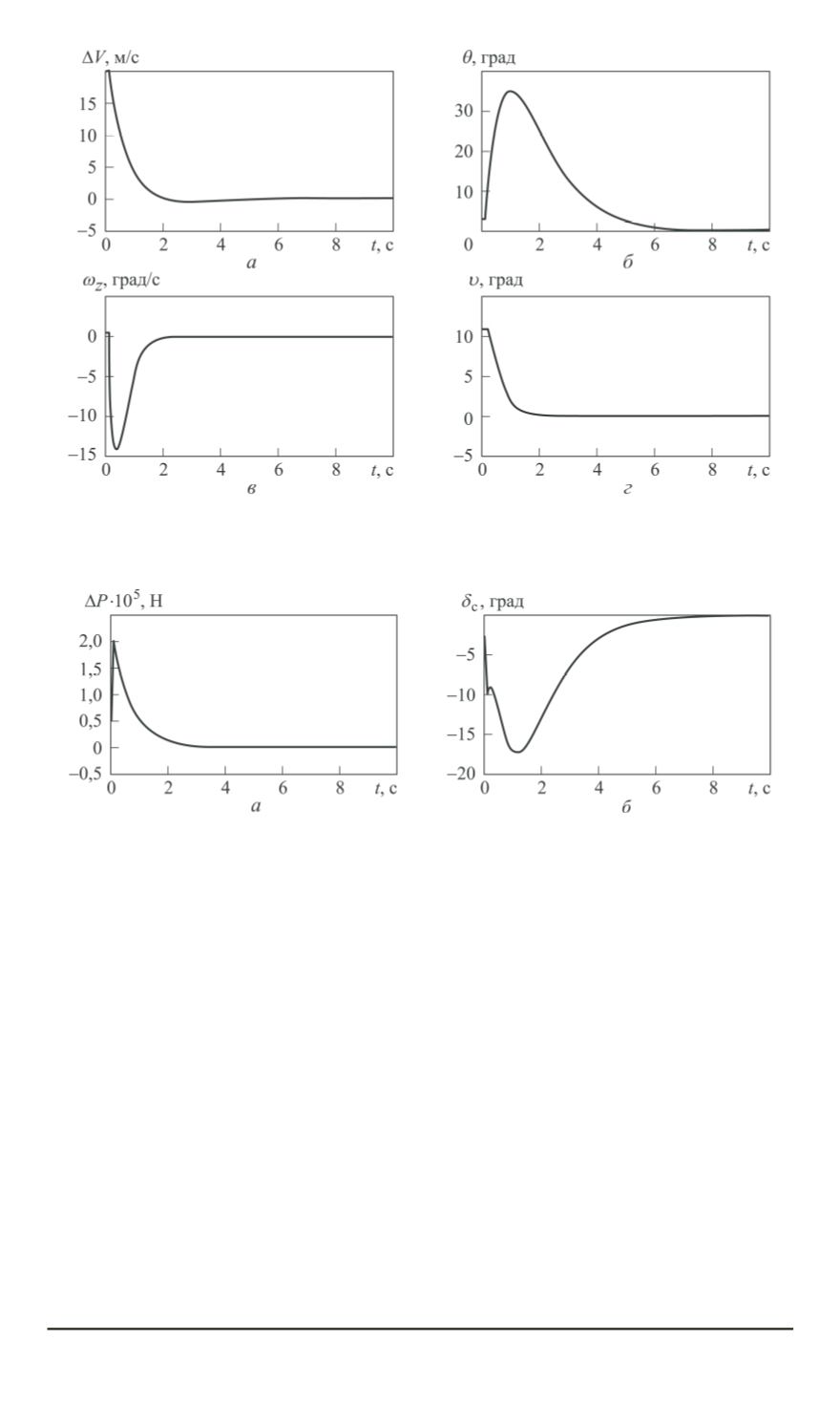
Рис. 1. Графики переходных процессов продольного канала:
а–г
— соответственно
(Δ
V
Δ
θ
Δ
ω
z
Δ
v
)
т
= (20
,
00 0
,
0464 0
,
0080 0
,
189)
т
Рис. 2. Графики изменения управляющих воздействий продольного канала:
а
— вектор тяги;
б
— угол отклонения стабилизатора
подходов, изложенных в [3–6], также можно получить аналитические
решения, но процесс их получения более трудоемкий, а их вид очень
громоздкий.
ЛИТЕРАТУРА
1.
Зубов Н.Е.
,
Микрин Е.А.
,
Мисриханов М.Ш.
,
Рябченко В.Н.
Синтез развязываю-
щих законов стабилизации орбитальной ориентации космического аппарата //
Изв. РАН. ТиСУ. 2012. № 1. С. 92–108.
2.
Зубов Н.Е.
,
Микрин Е.А.
,
Мисриханов М.Ш.
,
Рябченко В.Н.
Модификация метода
точного размещения полюсов и его применение в задачах управления движени-
ем космического аппарата // Изв. РАН. ТиСУ. 2013. № 2. С. 118–132.
3.
Misrikhanov
M.Sh.,
Ryabchenko V.N.
Pole placement for controlling a large scale
power system // Automation and Remote Control. Vol. 72:10 (2011). P. 2123–2146.
4.
Воробьева Е.А.
,
Зубов Н.Е.
,
Микрин Е.А.
и др. Синтез стабилизирующего упра-
вления космическим аппаратом на основе обобщенной формулы Аккермана //
Изв. РАН. ТиСУ. 2011. № 1. С. 96–106.
12 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2015. № 2