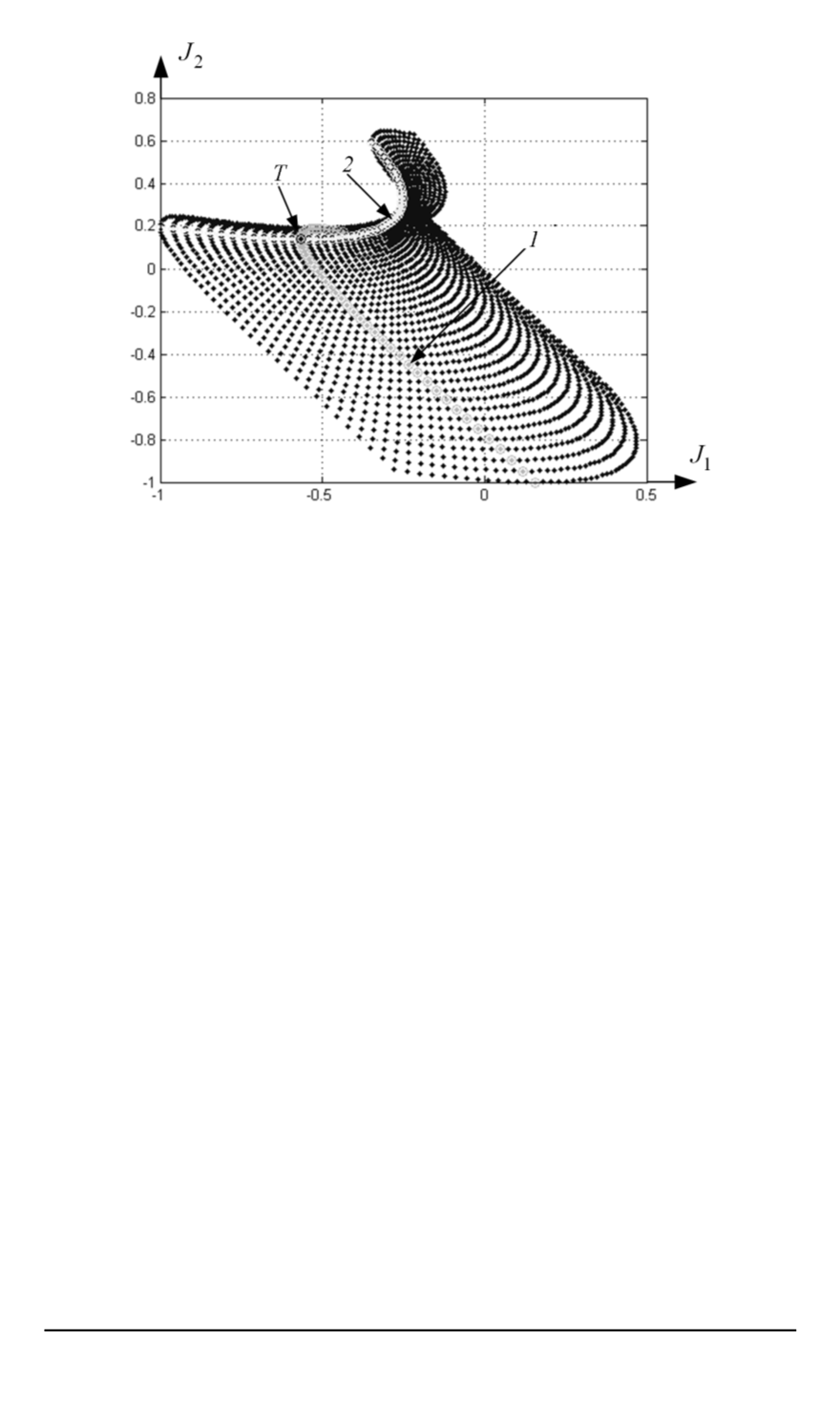
Рис. 4. Области сильного равновесия для первой (
1
) и второй (
2
) систем и точка
(Т) симметричного сильного равновесия
же области симметричных сильных равновесий. Области сильных ак-
тивных равновесий являются более межобъектно устойчивыми вида-
ми равновесий и формируются путем усиления понятия слабых рав-
новесий по функционалу противоположной стороны конфликта.
Области несимметричных и симметричных сильных равновесий
построены для той же модели, которая использовалась при исследо-
вании слабых равновесий (рис. 4).
Видно, что пересечение областей сильных активных равновесий
имеет место в одной точке области показателей, причем она распола-
гается в области симметричных слабых активных равновесий.
На рис. 5 приведено сравнение симметричного сильного равнове-
сия с точкой Нэша.
Точки Нэша и симметричного сильного равновесия очень близки;
разница лишь в том, что точка Нэша вычислена точным алгоритмом, а
точка сильного активного равновесия найдена приближенно на ортого-
нальной сети параметров. Поэтому симметричное сильное равновесие
можно использовать при получении СТЭК как приближенное реше-
ние или субоптимальный алгоритм, а при отсутствии равновесия по
Нэшу — как решение в более широких условиях существования.
Таким образом, рассмотренные методы получения сильных и сла-
бых активных равновесий расширяют область существования равно-
весий в задачах конфликтного противодействия систем и могут быть
использованы достаточно эффективно в совокупности с известными
58 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 3


