ветственно:
λ
1
(
a , ϕ
) =
π m
(
L
1
cos
ϕ
+
L
2
sin
ϕ
)
−
a
Re
Q
(
jω
)
R
(
jω
)
,
λ
2
(
a , ϕ
) =
π m
(
L
2
cos
ϕ
−
L
1
sin
ϕ
)
−
a
Im
Q
(
jω
)
R
(
jω
)
.
(25)
Подставляя в соотношения (25) вместо
L
1
и
L
2
их значения из (21),
после алгебраических преобразований окончательно получаем
λ
1
(
a , ϕ
) =
R
1
(
ω
)
Q
1
(
ω
) +
R
2
(
ω
)
Q
2
(
ω
)
|
R
(
jω
)
| |
Q
(
jω
)
|
;
λ
2
(
a , ϕ
) =
R
1
(
ω
)
Q
2
(
ω
)
−
R
2
(
ω
)
Q
1
(
ω
)
|
R
(
jω
)
| |
Q
(
jω
)
|
.
(26)
Искомое выражение оптимального закона программного управле-
ния (15) можно представить в виде
U
(
ψ
) =
U
0
sign
[(
Q
1
R
1
+
Q
2
R
2
) sin
ψ
+ (
Q
2
R
1
−
Q
1
R
2
) cos
ψ
]
.
(27)
Далее, учитывая, что
sin
ψ
=
x
a
,
cos
ψ
=
˙
x
aω
, запишем выражение для
оптимального закона активной обратной связи
U
(
x,
˙
x
) =
−
U
0
sign
(
Q
1
R
1
+
Q
2
R
2
)
x
+ (
Q
2
R
1
−
Q
1
R
2
)
˙
x
ω
.
(28)
Если частота внешнего возмущения постоянна и заранее извест-
на, то функции
λ
1
(
a , ϕ
)
и
λ
2
(
a , ϕ
)
являются постоянными коэф-
фициентами усиления при
x
(
t
)
и
˙
x
(
t
)
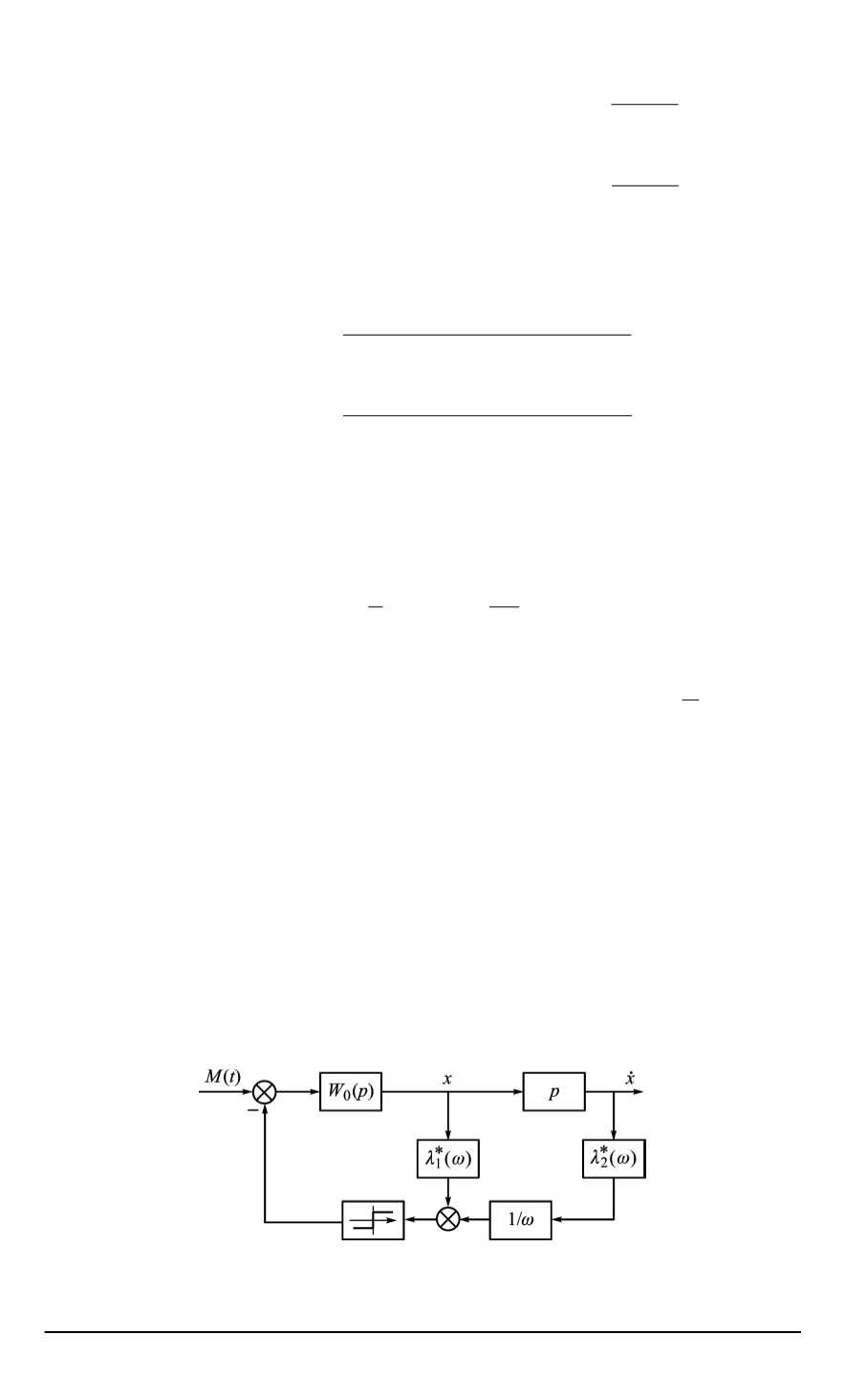
. Структурная схема системы с
оптимальной активной обратной связью, ограниченной по амплитуде
и обеспечивающей минимальную амплитуду вынужденных колебаний
с заданной частотой, представлена на рис. 2.
Существенной особенностью закона управления (28) является его
независимость от амплитуды и точки приложения внешнего возму-
щения.
Рис. 2. Структурная схема ГС с оптимальным управлением, ограниченным по
амплитуде
100 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 2


