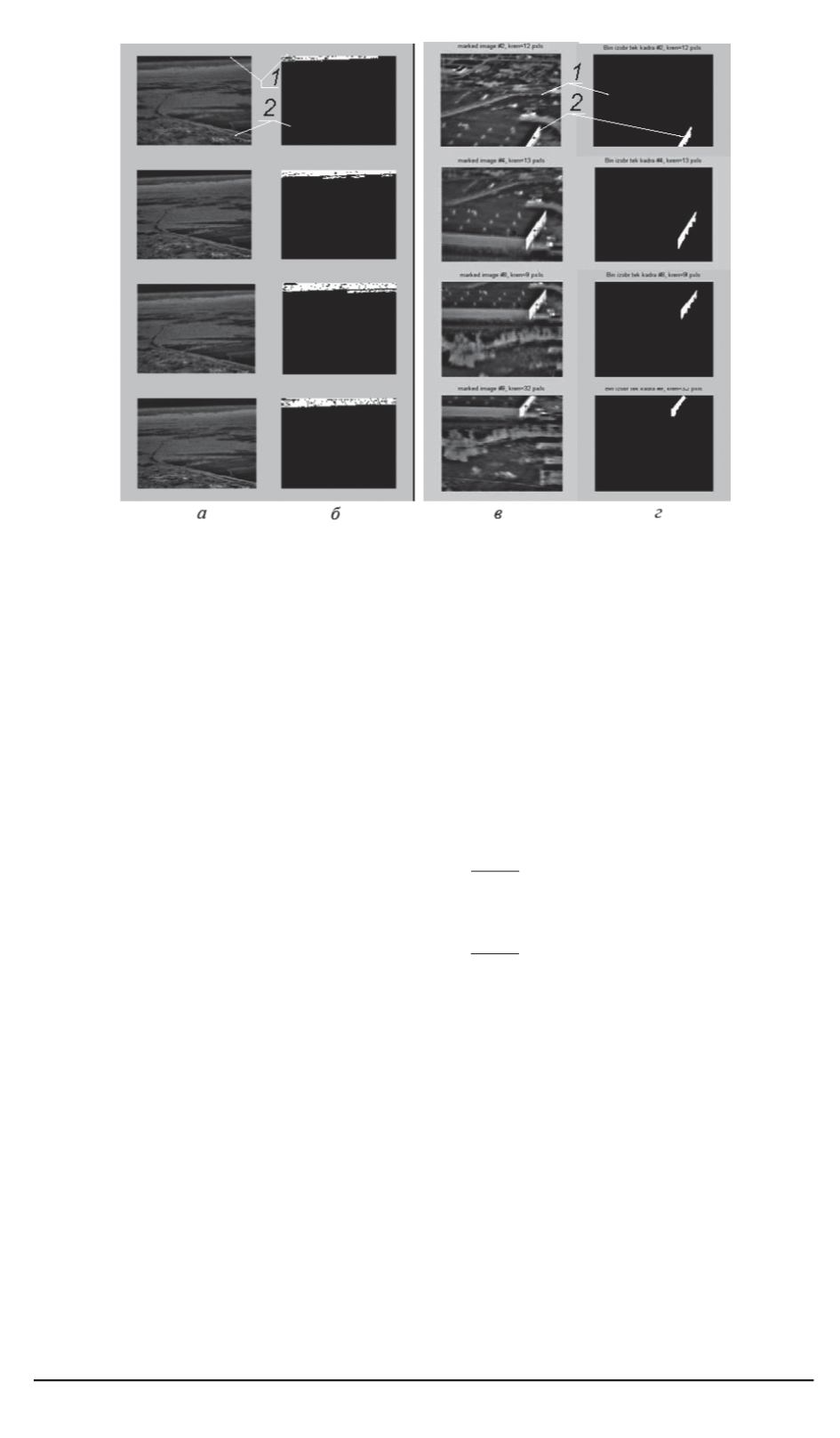
Рис. 3. Работа процедур анализа изображения в алгоритмах ориентации по обла-
стям неба и земли (
а, б
) и алгоритма стабилизации по яркостным пятнам под-
стилающей поверхности (
в, г
):
а
— кадры с оптической ГСН ИК-диапазона;
б
— преобразованные в результате
обработки кадры с найденными областями неба (
1
) и зем ли (
2
);
в
— кадры с оптиче-
ской ГСН видимого диапазона;
г
— преобразованные в результате обработки кадры
с выбраннымна поверхности земли (
1
) ориентиром(
2
)
что позволяет снизить вероятность отказов алгоритма ориентации до
приемлемого значения 0,08. Границы сектора поиска ориентира на
плоскости кадра определяют по формулам:
γ
max
2
=
γ
1
+ 360
·
f
max
f
ГСН
k
max
s
,
γ
min
2
=
γ
1
+ 360
·
f
max
f
ГСН
k
min
s
,
где
γ
1
[град] — угол поворота центра “тяжести” ориентира относи-
тельно вертикальной оси
О
y
1
на первомкадре;
γ
max
2
,
γ
min
2
[град] —
соответственно максимальная и минимальная границы сектора кад-
ра, в которомдолжен находиться ориентир на последующемкадре;
f
max
, Гц — максимальная частота закрутки УМД по крену;
f
ГСН
, Гц —
частота обработки в БВК кадров ГСН;
k
max
s
,
k
min
s
— коэффициенты, рас-
ширяющие сектор поиска ориентира из-за естественной флуктуации
угловой скорости вращения УМД. Максимальные значения
k
max
s
,
k
min
s
,
принимаемые для режима ориентации УМД, составляют
k
max
s
≈
1
,
2
,
k
min
s
≈
0
,
8
.
Исследования надежности алгоритма стабилизации выявили зави-
симость вероятности сбоев и отказов от количества и поперечных
62 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 2


