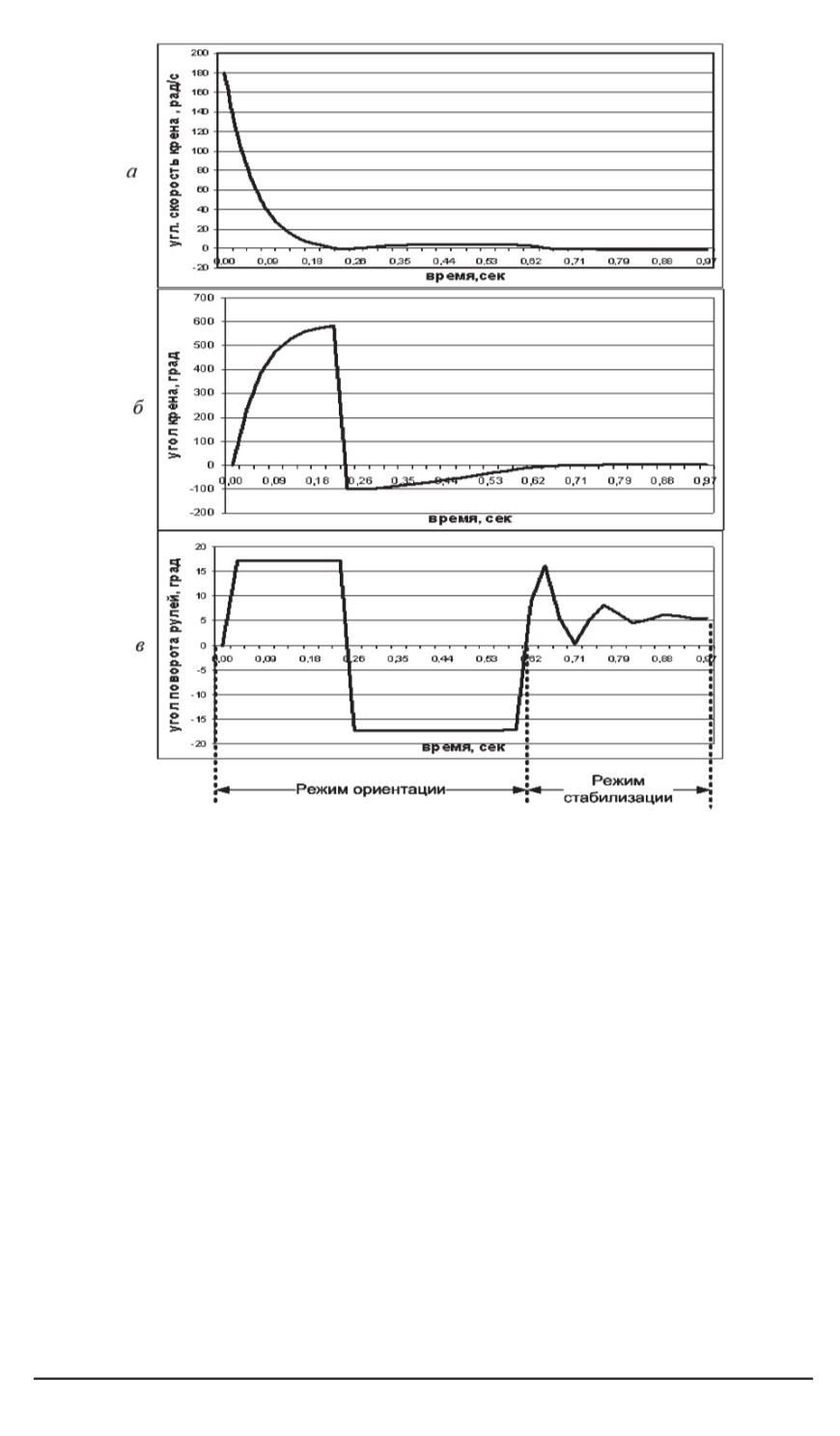
Рис. 7. Переходные процессы в системе ориентирования:
а
— изменение угловой скорости крена, рад/с;
б
— изменение угла крена, град;
в
—
переходный процесс по углу поворота рулей, град
Нестационарность модели объекта и рулевого привода была получе-
на путем изменения соответствующих параметров для исследуемых
траекторий полета УРС.
Результаты математического моделирования системы ориенти-
рования УМД для одного из режимов полета УРС (высота по-
лета
Н
≈
5
км; скорость полета
V
≈
300
м/c;
˙
γ
max
= 180
рад/с,
γ
max
= 180
град) показаны на рис. 7. На рис. 7,
а
и
б
приведены со-
ответственно процессы изменения угловой скорости крена и угла
крена УМД при работе системы ориентирования. На рис. 7,
в
по-
казан переходный процесс отработки рулями УМД управляющего
сигнала системы ориентирования. Как видно из рис. 7,
а
, ликвидация
начальной угловой скорости вращения УМД происходит за
∼
0
,
24
с
при отклоненных в крайнее положение рулях (см. рис. 7,
в
); таким
образом, время ликвидации “закрутки” УМД при ориентации опреде-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 2 67


