микропроцессорной техники, в том числе и отечественного производ-
ства, для построения БВК, а также относительная простота разрабо-
танных алгоритмов системы ориентирования позволяют проводить об-
работку полученных с ГСН изображений с частотой не менее 100 Гц.
УРС является маломаневренным летательным аппаратом. Поэтому
в качестве рулевого привода в УМД целесообразно использовать руле-
вой привод без искусственной обратной связи. Такой рулевой привод
управляет положениеморганов управления пропорционально величи-
не управляющего сигнала и обратно пропорционально величине шар-
нирного момента [4], что обеспечивает инвариантность коэффициента
передачи системы ориентирования по отношению к режимам полета
УРС.
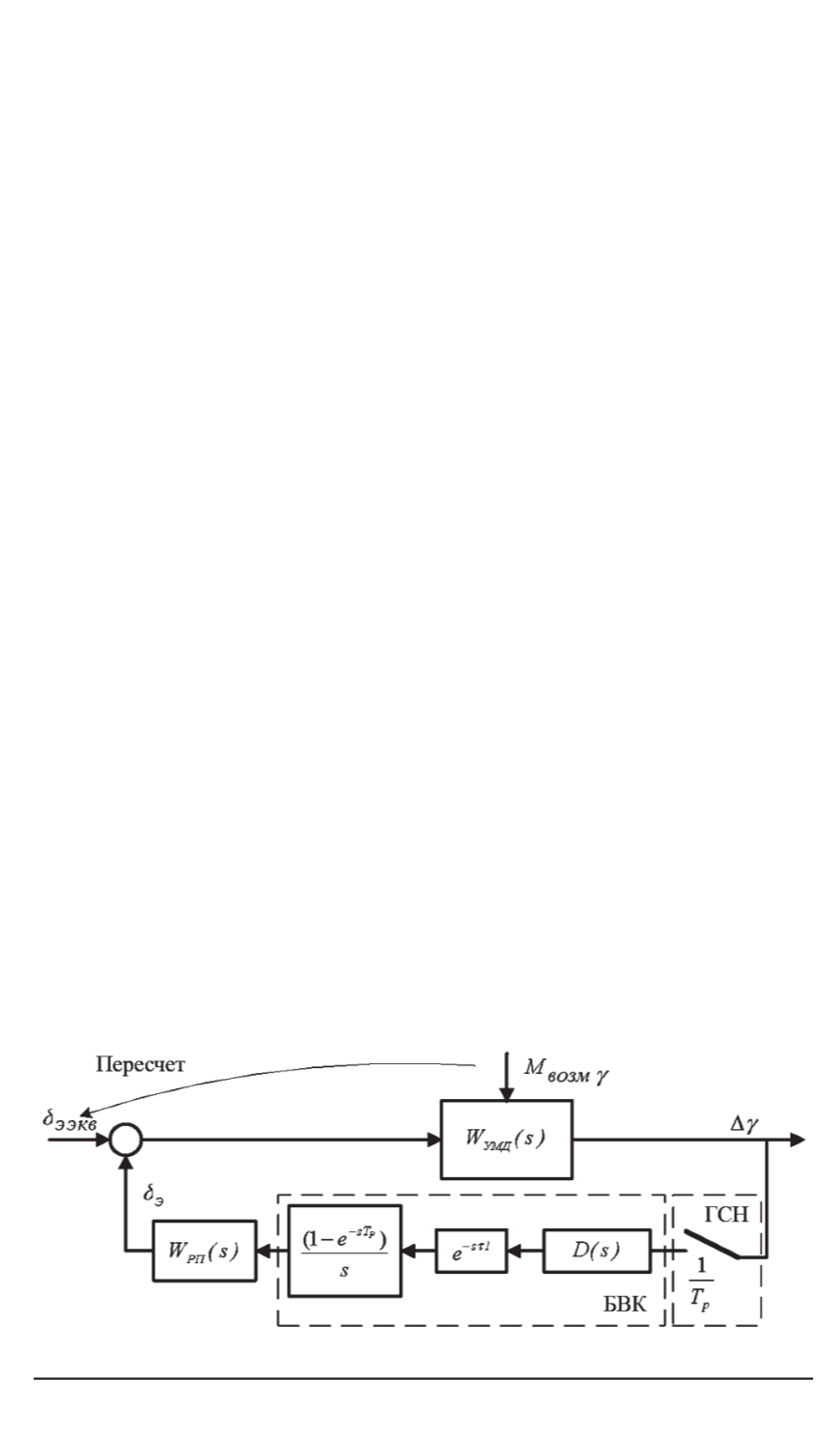
С учетом покадрового получения от ГСН информации система ори-
ентирования является дискретной и имеет структурную схему, приве-
денную на рис. 5. БВК на схеме рис. 5 представлен в виде трех эле-
ментов: дискретного корректирующего устройства (
D
(
s
))
,
вырабаты-
вающего управляющий сигнал на основе информации, поступающей
из импульсного элемента, имитирующего работу ГСН (реализация в
корректирующемустройстве ПД-закона управления, обеспечивающе-
го требуемые статические и динамические характеристики системы
ориентирования УМД, связана с возможностью получения значений
угла и угловой скорости крена при покадровомполучении информа-
ции с ГСН и известноминтервале времени
Т
Р
между кадрами); запаз-
дывающего звена с передаточной функцией
W
(
s
) =
e
−
sτ
1
, в которой
величина времени запаздывания
τ
1
соответствует времени, затрачива-
емому БВК на выполнение процедур обработки одного кадра с ГСН и
определения текущих значений параметров крена УМД; ЦАП, пред-
ставленного в виде передаточной функции экстраполятора нулевого
порядка.
Процедура синтеза корректирующего устройства системы ориен-
тирования состояла из следующих этапов.
Рис. 5. Структурная схема системы ориентирования
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 2 65


