1. Предварительный выбор для упрощенной модели УМД пара-
метров корректирующего устройства путем построения и анализа
областей устойчивости относительно параметров корректирующего
устройства для наиболее “тяжелых” режимов полета УРС. При упро-
щении модели системы ориентирования УМД исходная дискретно-
непрерывная система была сведена к непрерывной системе с запазды-
ванием[5]; время запаздывания соответствует значению
τ
1
.
2. Уточнение параметров корректирующего устройства с использо-
ваниемЛЧХ системы ориентирования УМД по углу крена для оценки
степени устойчивости и качества системы.
3. Окончательный выбор параметров корректирующего устройства
при исследовании системы ориентирования УМД путем математиче-
ского моделирования.
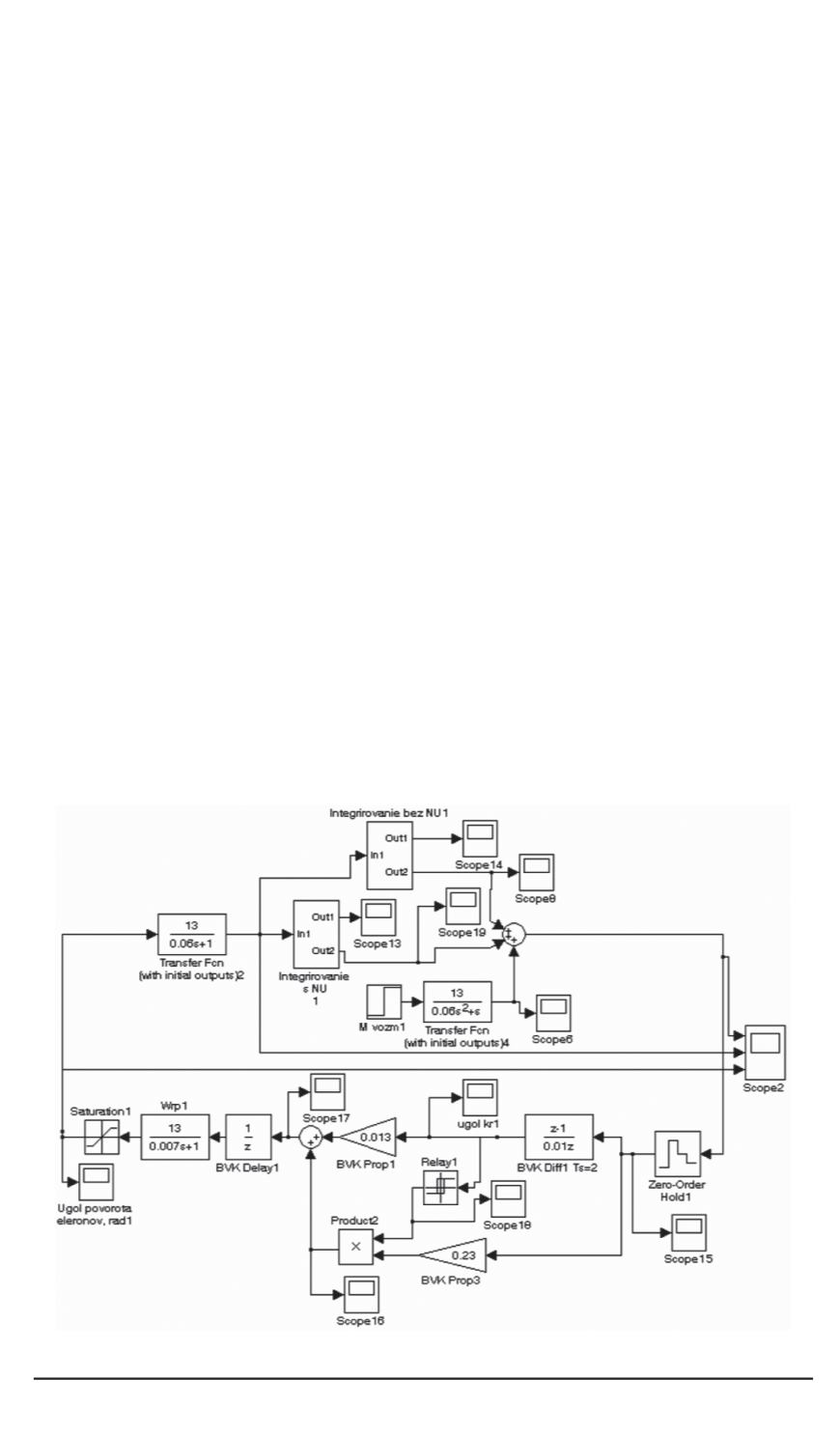
Моделирование системы ориентирования УМД в режимах ори-
ентации и стабилизации проводилось на нестационарной дискретно-
непрерывной модели системы (рис. 6), построенной в среде Mathlab
Simulink на основе структурной схемы рис. 5. При этом в модель руле-
вого привода было включено нелинейное звено, соответствующее фи-
зическому ограничению углов поворота рулей УМД максимальными
значениями
δ
max
э
=
±
18
град в режиме ориентации и
δ
max
э
=
±
8
град
в режиме стабилизации. Для описания объекта управления были ис-
пользованы программные блоки, допускающие установку начальных
значений параметров крена УМД:
˙
γ
max
= 180
рад/с,
γ
max
= 180
град.
Рис. 6. Дискретно-непрерывная модель системы ориентирования
66 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 2


