Рис. 6 (окончание)
переходного процесса в системе устанавливаются вынужденные коле-
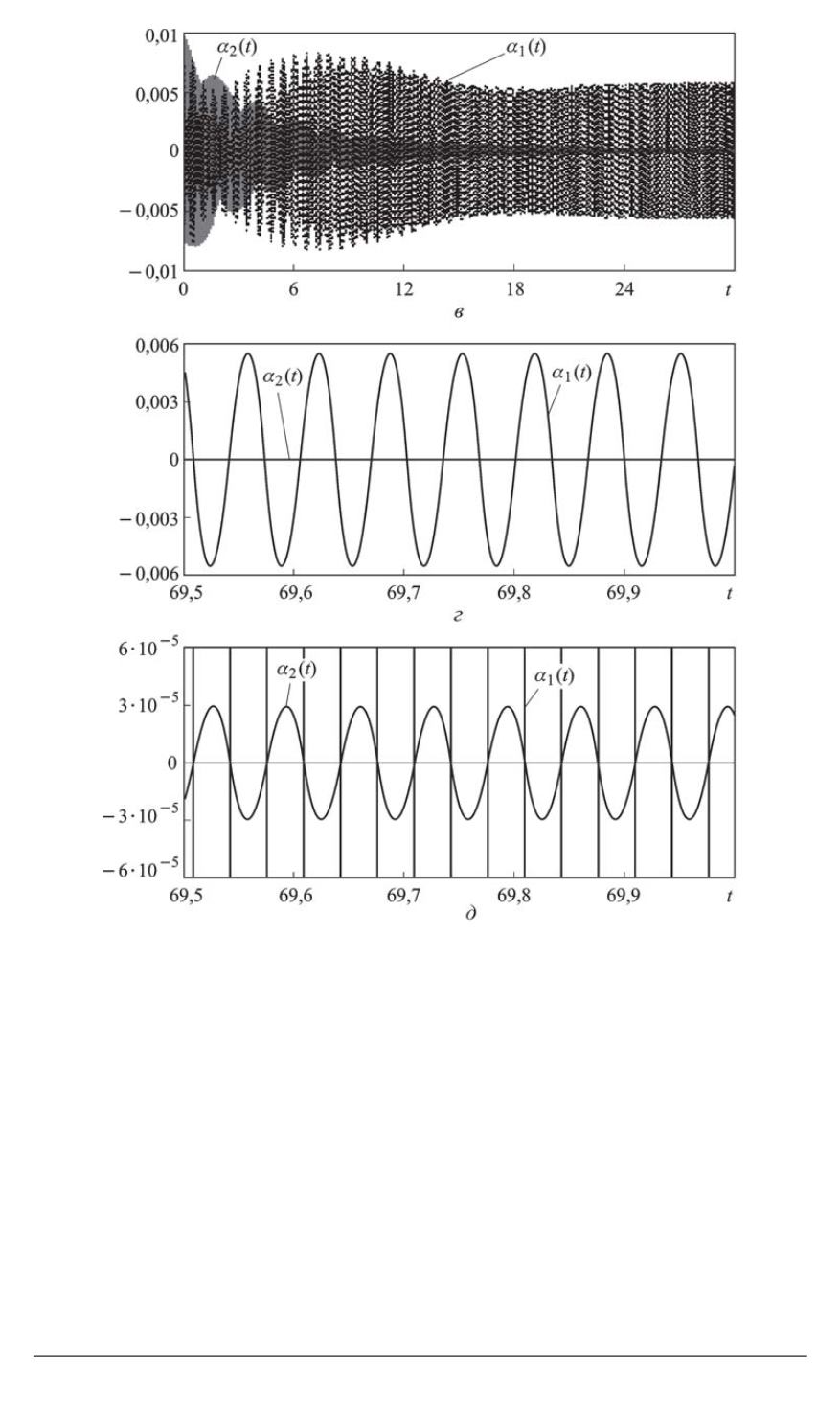
бания. При этом амплитуда колебаний ГС с активным демпфером в
6,5 раз меньше, чем амплитуда колебаний ГС с пассивным демпфе-
ром, кроме того, время переходного процесса ГС с активным демпфе-
ром в 5 раз меньше времени переходного процесса ГС с пассивными
демпферами. Существенно меньше и величина перерегулирования. На
рис. 6,
в. . . д
показаны недемпфируемые (
μ
= 0)
вынужденные колеба-
ния ГС с пассивным
α
1
(
t
)
и активным
α
2
(
t
)
динамическим гасителем
для случая, когда частота
ω
внешнего воздействия
M
α
=
a
M
sin(
ω t
)
отличается от частоты настройки
ν
2
=
ν
1
на 5%, при этом учтено
сопутствующее трение оси карданова подвеса, так что относительный
54 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 4


