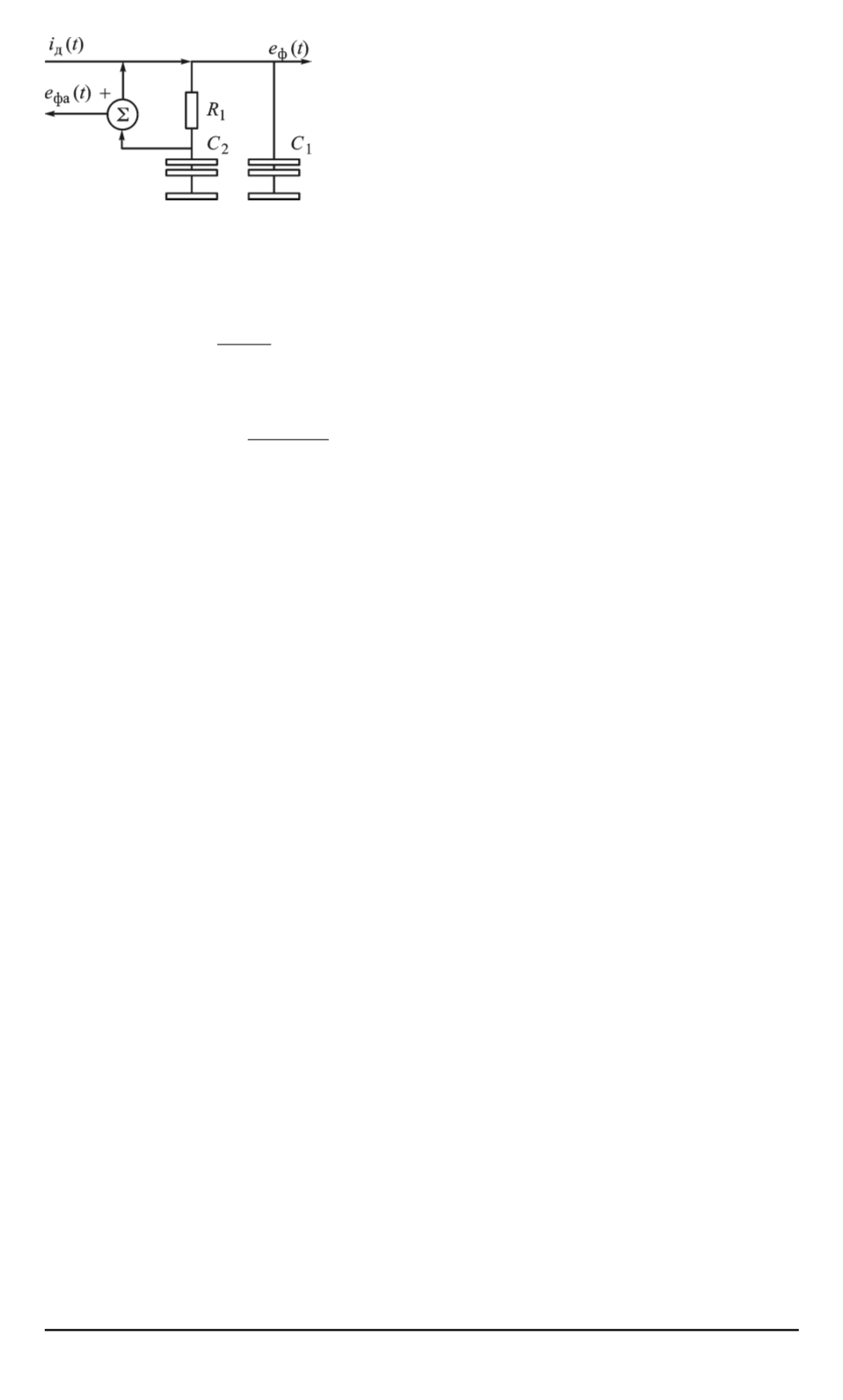
Рис. 4. Фильтр нижних частот цепи
управления системы ИФАПЧ
ветствующие сигналы:
ϕ
1
(
t
) = 2
π
∙
sign
(
ϕ
ДСМ
[
nT
0
])[1(
t
−
nT
0
)
−
1(
t
−
nT
0
−
τ
ДСМ
[
nT
0
])];
ϕ
2
(
t
) =
−
T
0
τ
ТУА
n
ϕ
ДСМ
[
nT
0
][1(
t
−
nT
0
)
−
1(
t
−
nT
0
−
τ
ТУА
n
)]
.
Из сравнения двух адаптивных схем ИФАПЧ (на рис. 3 и 1) следует,
что
K
int
=
G
int
S
ТУА
2
πτ
ТУА
n
i
м
T
0
.
При анализе адаптивной системы ИФАПЧ наряду с общими соот-
ношениями (в качестве примера) будем ориентироваться на исполь-
зование в цепи управления УГ простейшей схемы ФНЧ — ФНЧ
4
,
представленной на рис. 4. В отличие от подходов к исследованию
в цитируемой литературе в настоящей работе сигнал управления
e
фа
(
t
)
,
снимаемый с ФНЧ
4
для управления процессом адаптации,
определяется как разность напряжений на конденсаторах С1 и С2,
т.е.
e
фа
(
t
) =
U
c1
(
t
)
−
U
c2
(
t
)
. Предлагаемый подход позволяет избежать
проблем, связанных с нежелательным влиянием постоянной составля-
ющей выходного сигнала ФНЧ
4
на процесс адаптации.
Математическая модель адаптивной системы ИФАПЧ.
Для по-
лучения математической модели адаптивной системы ИФАПЧ будем
использовать дифференциальные уравнения, описывающие ее в про-
странстве состояний, вида
˙X = AX + B
{
ϕ
1
(
t
) +
ϕ
2
(
t
)
U
int
(
t
)
}
;
˙
U
int
(
t
) =
K
int
F
(
ϕ
ДСМ
[
nT
0
])
e
фа
(t),
e
фа
(
t
) = CX
,
(2)
где
X
— вектор состояния размерностью
k
(напряжения на конденса-
торах, токи в индуктивностях ФНЧ и фаза
Ф
у
(
t
))
УГ непосредственно
системы ИФАПЧ;
A
— квадратная матрица состояния;
B
— вектор
управления;
C
— вектор-строка для вычисления выходной координа-
ты
e
фа
(
t
)
ФНЧ
4
.
Для линейной схемы системы ИФАПЧ с адаптацией на рис. 3
имеем
X
=
[
U
c1
(
t
);
U
c2
(
t
);
Ф
y
(
t
)]
,
A
=
−
1
/T
3
1
/T
3
−
i
м
/
(2
πN
0
C
1
)
1
/T
1
−
1
/T
1
0
2
πS
УГ
0
0
,
28 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 1


