i
ТУА
(
t
) =
i
ТУА
[
n
][1(
t
−
nT
0
)
−
1(
t
−
nT
0
−
τ
ТУА
n
)] =
=
U
int
(
t
)
S
ТУА
ϕ
ДСМ
[
nT
0
][1(
t
−
nT
0
)
−
1(
t
−
nT
0
−
τ
ТУА
n
)]
,
где
U
int
(
t
)
— напряжение на выходе интегратора И, а
S
ТУА
— крутизна
характеристики управления аттенюатора ТУА.
Постановка задачи.
Необходимо отметить, что точное выполне-
ние соотношения (1) возможно только при использовании автомати-
ческой (адаптивной) системы настройки на минимум уровня помех
дробности на выходе ФНЧ. Поскольку в работах [11–14] не даны ре-
комендации по нахождению параметра интегратора
G
int
и зависимо-
стей времени адаптации от
G
int
и характеристик собственно системы
ИФАПЧ, поэтому задачей настоящей работы является устранение про-
белов в данном вопросе. Для решения поставленной задачи введем
допущения:
Допущение 1
— частота опорного сигнала
1
/T
0
выше частоты сре-
за ИФАПЧ, т.е. рассматриваем систему ИФАПЧ как непрерывную и
описываемую с помощью системы обыкновенных дифференциальных
уравнений в пространстве состояний.
Допущение 2
—
τ
ДСМ
[
nT
0
]
T
0
— это соотношение обеспечивается
в реальном устройстве при исследовании воздействий помех ДСМ и
позволяет перейти от нелинейной системы ИФАПЧ к линейной систе-
ме ИФАПЧ.
Допущение 3
—
τ
ДСМ
[
nT
0
]
6
τ
ТУА
n
— эта ситуация также, как пра-
вило, обеспечивается в реальных адаптивных системах ИФАПЧ.
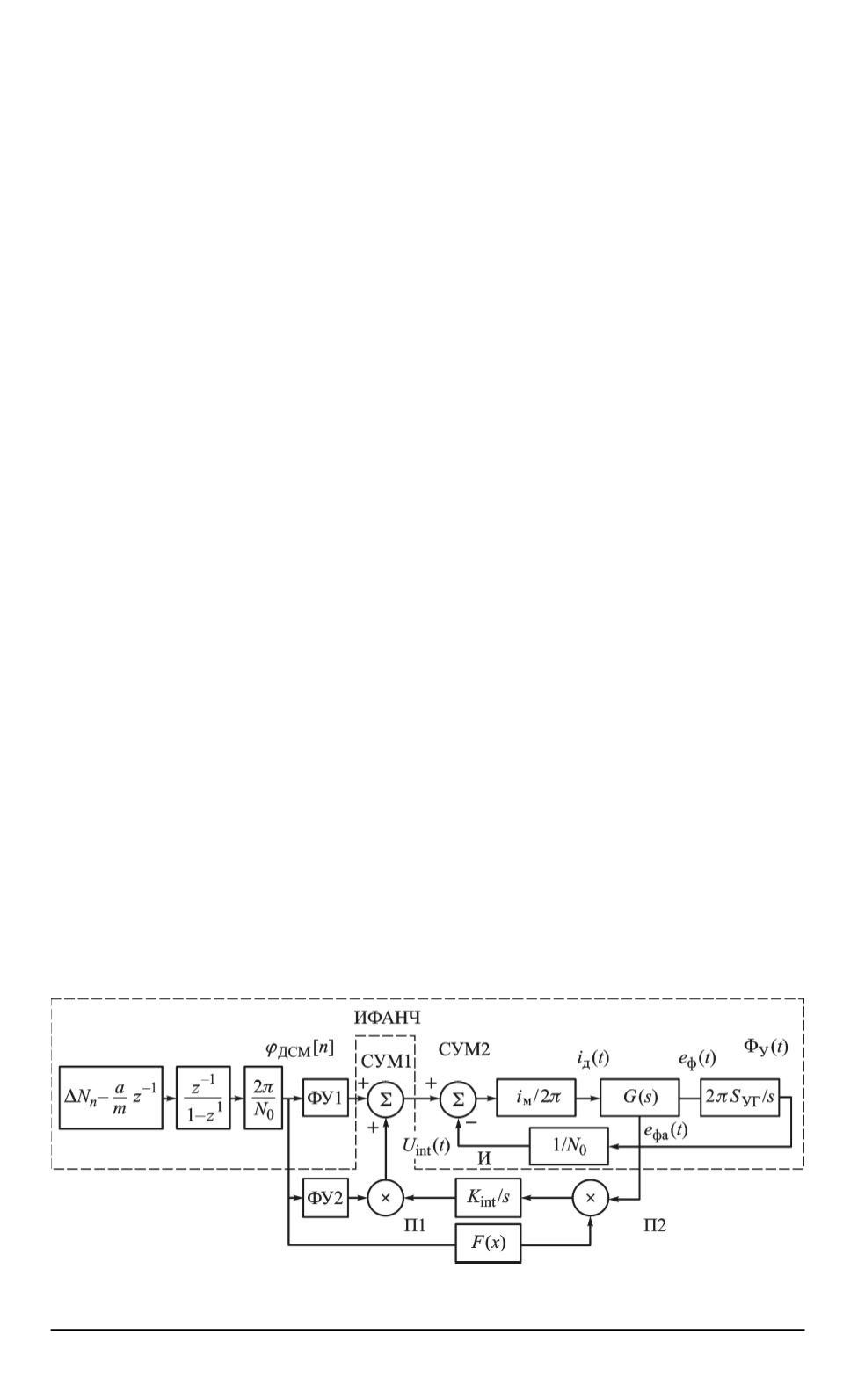
С учетом этих допущений и [15] перейдем к анализу импульсно-
непрерывной адаптивной системы ИФАПЧ, представленной на рис. 3,
на котором в соответствии со схемой рис. 1 как аналоги блоков ТУА
и интегратора И введены устройство перемножения П1 и аналоговый
интегратор с передаточной функцией
K
int
/s
, а также формирующие
устройства ФУ1 и ФУ2. На выходах ФУ1 и ФУ2 сформированы соот-
Рис. 3. Линейная схема системы ИФАПЧ с адаптацией
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2013. № 1 27


