














 8 / 13
8 / 13

А.В. Сумароков
92
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 4
системы управления движением и внешней среды; модель упругих колебаний
конструкции МКС; модель бортового компьютера системы управления движе-
нием МКС; модель компьютера, управляющего научной аппаратурой со штат-
ным бортовым программным обеспечением; сервисное программное обеспече-
ние. На рис. 2 вертикальными штриховыми прямыми показаны моменты вре-
мени, когда наблюдаемая область наиболее близка к проекции траектории МКС
на поверхность Земли (текущей подспутниковой точке). В промежутках време-
ни 1200…1320 с, 1450…1660 с, 1750…1800 с происходит перевод ДПН на траек-
торию съемки, а в промежутках времени 1320…1450 с, 1660…1750 с, 1800…
1900 с — непосредственно сеансы съемки.
Летно-конструкторские испытания алгоритма и результаты видеосъе-
мок.
В ходе испытаний, проводимых с конца ноября 2014 г., было выполнено
несколько десятков сеансов наблюдения за целями на поверхности Земли. До-
полнительно также выполняли различные работы, направленные на уточнение
характеристик системы МКС — ДПН — HRC. Работу приводов ДПН контроли-
ровали как датчики положения самой платформы, так и гироскопические дат-
чики угловой скорости, расположенные непосредственно на HRC для обеспече-
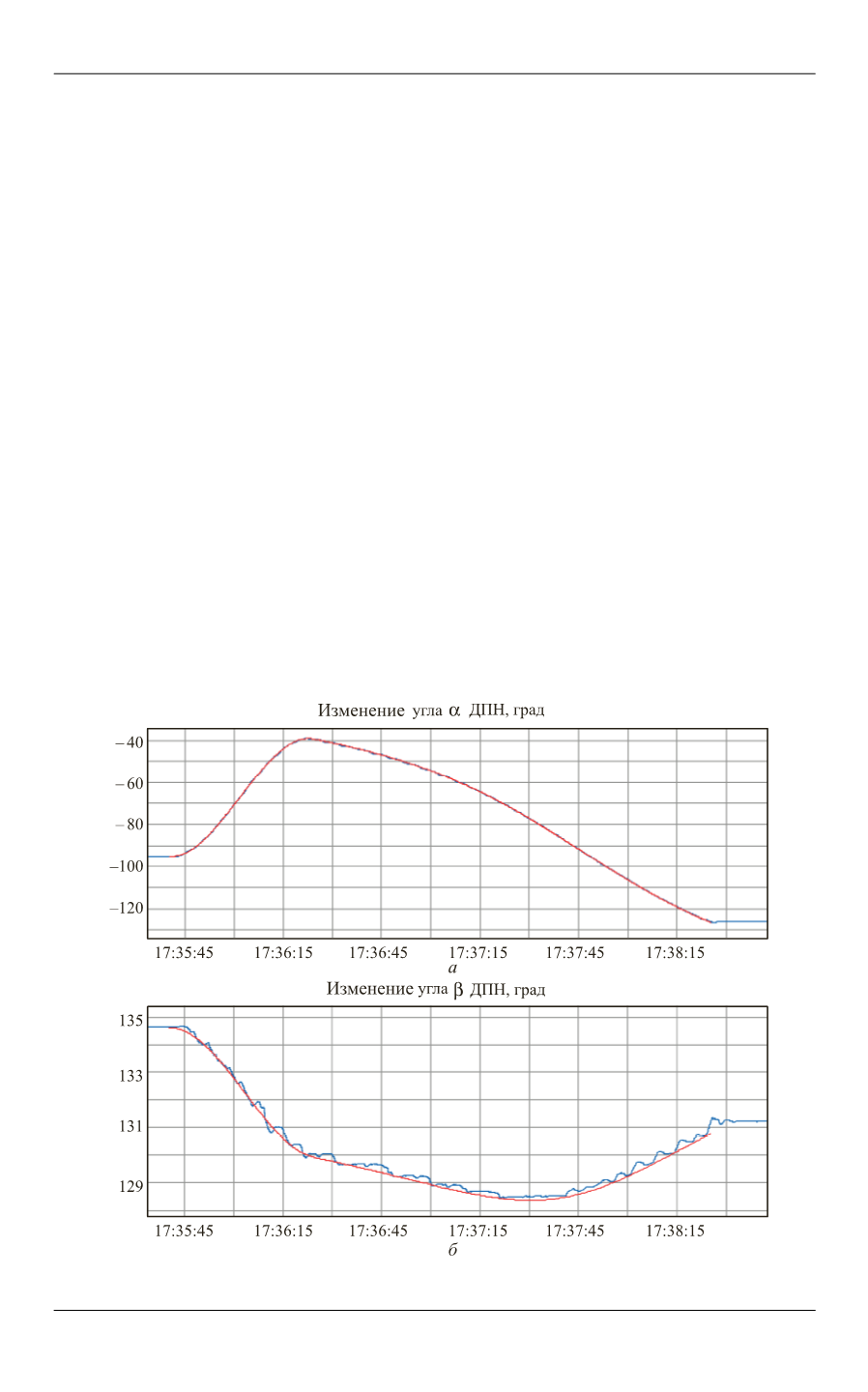
ния возможности наземной обработки полученных данных. В качестве иллю-
страции работы алгоритма наведения и поведения ДПН на рис. 3 приведены
графики изменения углов поворота вокруг осей Альфа и Бета, полученные по
данным телеметрии в ходе сеанса съемки территории г. Лас-Вегас 27 февраля
Рис. 3.
Изменение расчетных и измеренных углов при движении ДПН