














 5 / 13
5 / 13

О наведении камеры высокого разрешения, установленной на борту МКС…
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2016. № 4
89
где
D
— установочный кватернион ДПН относительно связанной системы ко-
ординат МКС;
A
— кватернион перехода от инерциальной системы координат
J2000 к связанной системе координат МКС, экстраполированный на необходи-
мый момент времени с помощью (1) и (2);
G
— кватернион перехода из грин-
вической системы координат WGS84 в инерциальную систему J2000, который
зависит только от времени и может быть вычислен c разной степенью точности,
согласно методике [7].
Расчет требуемых углов поворота осей ДПН.
Конструктивные особенно-
сти ДПН таковы, что в системе координат ДПН ось привода Бета имеет коорди-
наты
1 0 0 ,
A
а ось привода Альфа — координаты
A
0 cos 5 sin 5 .
Следовательно, задача определения углов поворота
платформы сводится к задаче поворота исходного вектора сначала на угол
во-
круг
β
,
A
а потом на угол
вокруг
.
A
Таким образом, исходный вектор сов-
мещается с направлением указания цели.
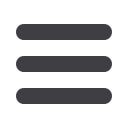
Для определения углов
и
рассмотрим два конуса вращения (рис. 1).
Первый конус с осью
A
и образую-
щей — вектором нулевого положения
ДПН
.
V
Второй конус с осью
A
и
образующей — вектором цели
BPP
.
T
Эти два конуса должны иметь две
линии пересечения, определяющие
два различных набора углов
и
. Из
двух наборов выберем такой, в кото-
ром значение по модуля угла
мини-
мально, либо в котором значения уг-
лов соответствуют разрешенному
диапазону углов поворота ДПН.
Вектор линий пересечения конусов можно найти из условия постоянства
скалярного произведения вектора оси конуса на вектор его образующей:
BPP
BPP
2 2
,
cos 5
sin5
cos 5 sin5 ,
1
.
x
y
z
V x
T
T y
z
z
x y
Таким образом, для нахождения координаты вектора
y
получаем следую-
щее квадратное уравнение:
BPP
BPP
2 2
cos 5
sin5
cos 5
1
.
sin5
y
z
x
T
T y
V y
Обозначив коэффициенты квадратного уравнения как
BPP
BPP
cos 5
sin5
cos 5
,
,
sin5
sin5
y
z
T
T
a
b
Рис. 1.
Расчет углов поворота ДПН